



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZZyVl51t
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
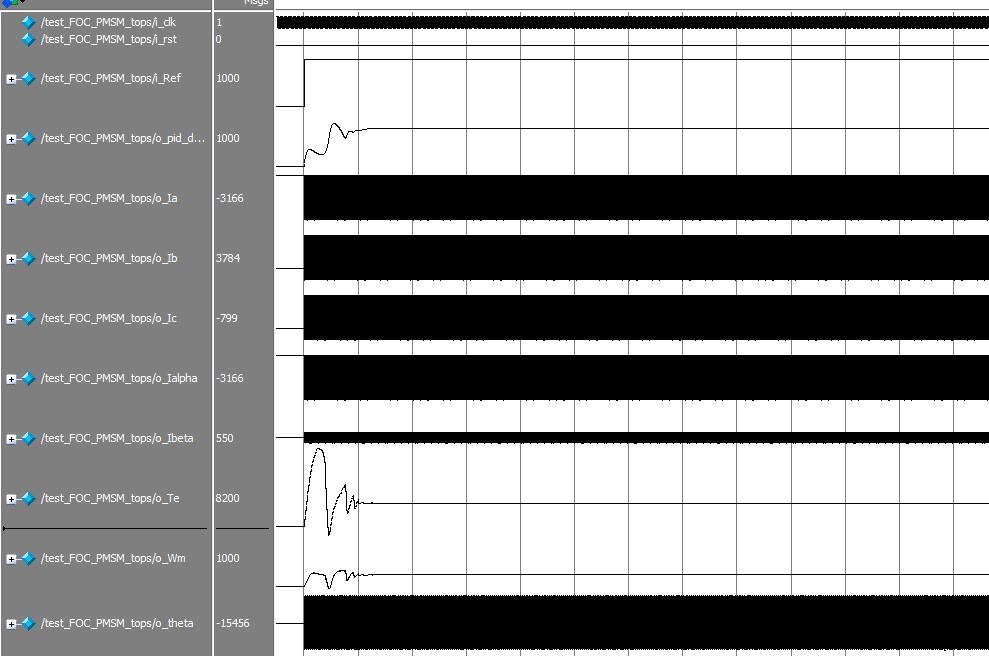
2.部分仿真图预览
3.算法概述
FOC控制的其实是电机的电磁场方向。转子的转子力矩正比于定子的磁场向量与转子磁场矢量的矢量积。由矢量的关系可知,若使电机的转矩时刻保持最大,则定子磁场向量应与转子磁场向量相互垂直。又因为磁场的大小与方向与电流的大小与方向有着直接的关系,所以在用FOC控制算法控制BLDC时的关键就是控制三相输入的电流大小与方向。而控制电流产生定子磁场与转子磁场垂直的关键在:控制稳定的三相输入电压及其电流向量,并且我们得知道转子的实时位置。
4.部分源码
...................................................................
PID_tops PID_tops_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_kp (16'b0001_1111_1111_1111),
.i_ki (16'b0000_0000_0010_0011),
.i_kd (16'b0000_0000_0000_0001),
.i_din (err1),
.o_dout (o_pid_dout),
//test port
.o_doutp (),
.o_douti (),
.o_doutd ()
);
wire signed[15:0]o_Id;
wire signed[15:0]o_Iq;
wire signed[15:0]err11;
wire signed[15:0]err12;
assign err11 = o_pid_dout-o_Id;
assign err12 = 0-o_Iq;
wire signed[15:0]o_pid_dout1;
wire signed[15:0]o_pid_dout2;
PID_tops PID_tops_u1(
.i_clk (i_clk),
.i_rst (i_rst),
.i_kp (16'b0001_1111_1111_1111),
.i_ki (16'b0000_0000_0010_0011),
.i_kd (16'b0000_0000_0000_0001),
.i_din (err11),
.o_dout (o_pid_dout1),
//test port
.o_doutp (),
.o_douti (),
.o_doutd ()
);
PID_tops PID_tops_u2(
.i_clk (i_clk),
.i_rst (i_rst),
.i_kp (16'b0001_1111_1111_1111),
.i_ki (16'b0000_0000_0010_0011),
.i_kd (16'b0000_0000_0000_0001),
.i_din (err12),
.o_dout (o_pid_dout2),
//test port
.o_doutp (),
.o_douti (),
.o_doutd ()
);
//
//INV PARK
wire signed[15:0]o_Uaref;
wire signed[15:0]o_Ubref;
INVPARK INVPARK_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_D (o_pid_dout1),
.i_Q (o_pid_dout2),
.i_theta (o_theta),
.o_alpha (o_Uaref),
.o_beta (o_Ubref)
);
//
//SVPWM
wire w_PWM1;
wire w_PWM2;
wire w_PWM3;
wire w_PWM4;
wire w_PWM5;
wire w_PWM6;
SVPWM SVPWM_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_Uaref(o_Uaref),
.i_Ubref(o_Ubref),
.o_PWM1 (w_PWM1),
.o_PWM2 (w_PWM2),
.o_PWM3 (w_PWM3),
.o_PWM4 (w_PWM4),
.o_PWM5 (w_PWM5),
.o_PWM6 (w_PWM6)
);
//
//IGBT+PMSM
IGBT_PMSM_simple IGBT_PMSM_simple_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_PWM1 (w_PWM1),
.i_PWM2 (w_PWM2),
.i_PWM3 (w_PWM3),
.i_PWM4 (w_PWM4),
.i_PWM5 (w_PWM5),
.i_PWM6 (w_PWM6),
.i_pid (o_pid_dout),
.i_Te (16'd100),
.o_Ia (o_Ia),
.o_Ib (o_Ib),
.o_Ic (o_Ic),
.o_Te (o_Te),
.o_Wm (o_Wm),
.o_theta(o_theta)
);
//
//CLARK
CLARK CLARK_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_Ia (o_Ia),
.i_Ib (o_Ib),
.o_Id (o_Ialpha),
.o_Iq (o_Ibeta)
);
//
//PARK
PARK PARK_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_d (o_Ialpha),
.i_q (o_Ibeta),
.i_theta (o_theta),
.o_ID (o_Id),
.o_IQ (o_Iq)
);
endmodule
08_060_m

































