



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y56Yl55p
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
2.部分仿真图预览
3.算法概述
模糊自适应控制器同时结合自适应控制和模糊控制,形成具有自适应的功能的控制系统。模糊自适应控制不要求控制对象具有精确的数学模型,并且还巧妙的引入了自适应律以方便实时的去学习被控对象所具有的各种动态特性,然后再根据动态特性的实时变化来自动更新和修改以及在线实时调整对应的模糊控制器,这样就使得系统在出现各种各样的不确定因素的时候,控制器的控制效果仍然可以保持一致以及具有良好的鲁棒性。
模糊自适应控制器的基本框架如图1所示。从图1可以看出,在自适应模糊控制的过程中,自适应规则的设计是依据控制性能指标来设计的,随着环境的变化自适应律不断用来修正模糊控制器中的参数。而在非自适应模糊控制系统,模糊控制器是事先已经设计好的,控制器的参数不依控制性能而改变,这就可能导致控制失效。因此,自适应模糊控制具有较好的控制性能。
4.部分源码
clc;
close all;
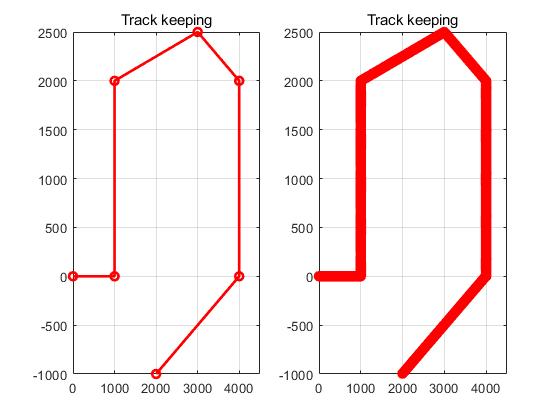
%首先在m文件中画出 p1,p2,p3,p4,p5,p6;
p0=[0 0];
p1=[1000 0];
p2=[1000 2000];
p3=[3000 2500];
p4=[4000 2000];
p5=[4000 0];
p6=[2000 -1000];
x=[p0(1) p1(1) p2(1) p3(1) p4(1) p5(1) p6(1)];
y=[p0(2) p1(2) p2(2) p3(2) p4(2) p5(2) p6(2)];
load x3.mat
load y3.mat
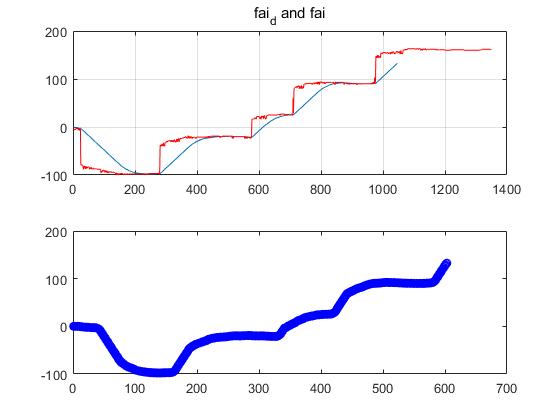
%直接对路经进行控制可定不可行,需要对路经的角度进行控制,然后反馈过来去控制船的路线
%计算实际的
load fai_tan.mat
load fai_tan2.mat
load x3.mat
load y3.mat
save x3.mat x3
save y3.mat y3
load s.mat
%控制后的录像
x0n(1)=x3(2)-150;
y0n(1)=y3(2)+20;
vn=1.19*s/length(fai_tan2);
for i = 2:length(fai_tan2)-1
x0n(i)= x0n(i-1)+vn*cos(fai_tan2(2,i-1));
y0n(i)= y0n(i-1)+vn*sin(fai_tan2(2,i-1));
end
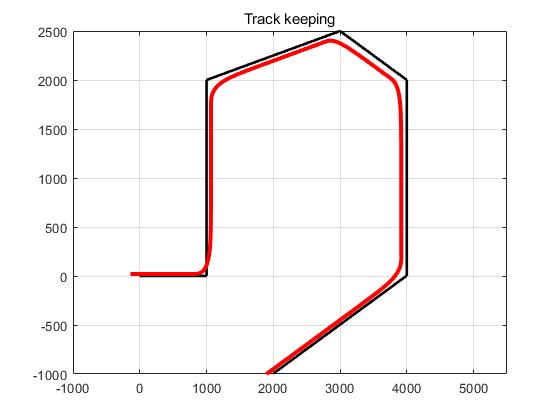
plot(x3,y3,'k','LineWidth',2);
axis([-1000,5500,-1000,2500]);
grid on;hold on;
title('Track keeping');
plot(x0n,y0n,'r','LineWidth',3)
08_005_m

































