核心提示:A240,包括程序操作录像...
1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZpWUk55p
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
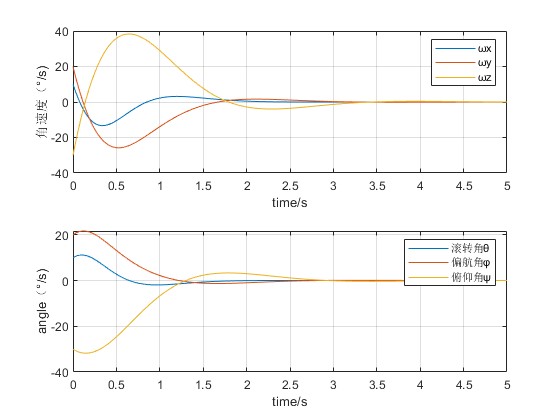
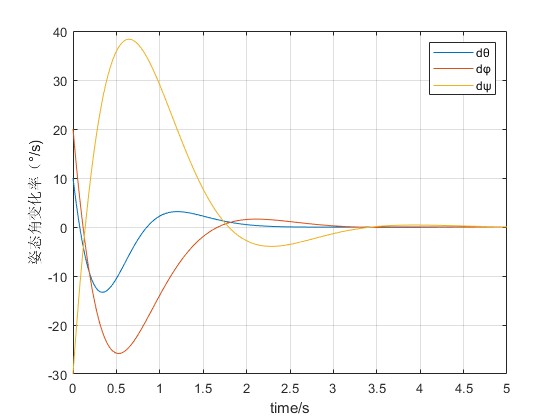
2.部分仿真图预览
3.算法概述
无人机是无人驾驶飞机的简称(Unmanned Aerial Vehicle),是利用无线电遥控设备和自备的程序控制装置的不载人飞机,包括无人直升机、固定翼机、多旋翼飞行器、无人飞艇、无人伞翼机。广义地看也包括临近空间飞行器(20-100 公里空域),如平流层飞艇、高空气球、太阳能无人机等。从某种角度来看,无人机可以在无人驾驶的条件下完成复杂空中飞行任务和各种负载任务,可以被看做是 “空中机器人”。
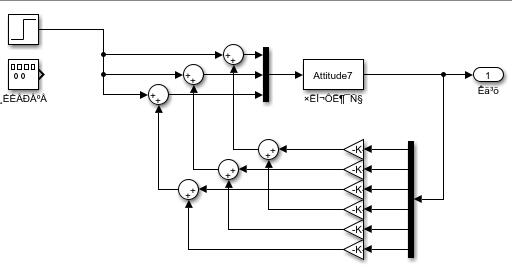
飞控子系统是无人机完成起飞、空中飞行、执行任务和返场回收等整个飞行过程的核心系统,飞控对于无人机相当于驾驶员对于有人机的作用,我们认为是无人机最核心的技术之一。飞控一般包括传感器、机载计算机和伺服作动设备三大部分,实现的功能主要有无人机姿态稳定和控制、无人机任务设备管理和应急控制三大类。
4.部分源码