核心提示:05_066_m,包括程序操作录像+说明文档+参考文献...
1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y56VlZlq
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
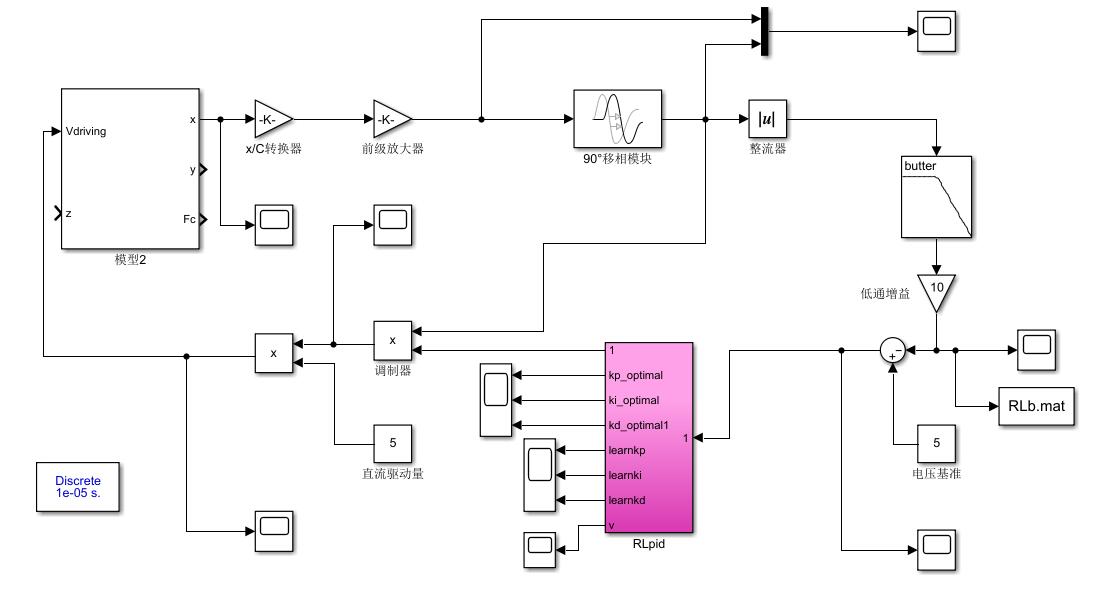
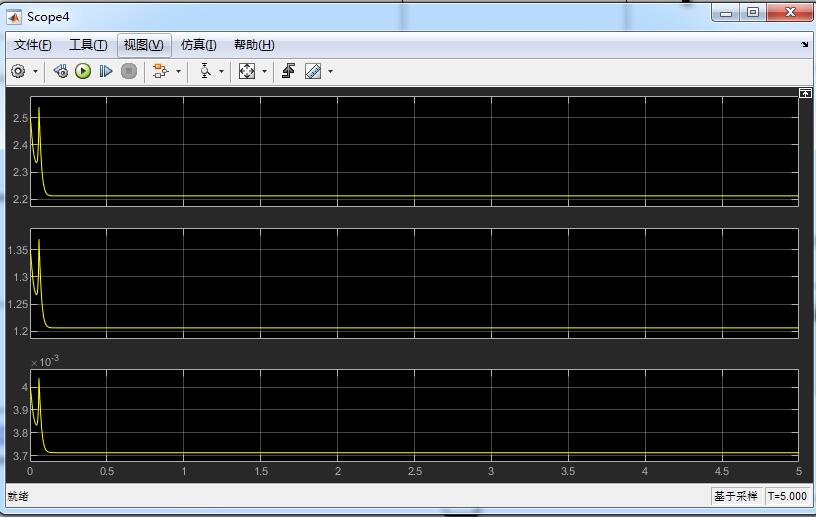
2.部分仿真图预览
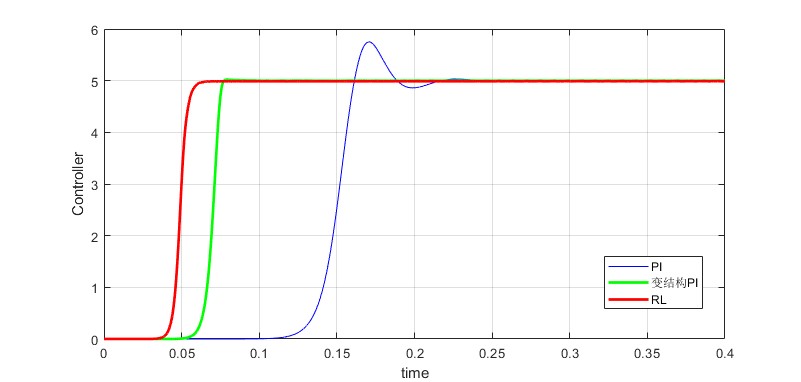
3.算法概述
强化学习的常见模型是标准的马尔可夫决策过程(Markov Decision Process, MDP)。按给定条件,强化学习可分为基于模式的强化学习(model-based RL)和无模式强化学习(model-free RL),以及主动强化学习(active RL)和被动强化学习(passive RL)。强化学习的变体包括逆向强化学习、阶层强化学习和部分可观测系统的强化学习。求解强化学习问题所使用的算法可分为策略搜索算法和值函数(value function)算法两类。深度学习模型可以在强化学习中得到使用,形成深度强化学习。
4.部分源码