核心提示:A138,包括程序操作录像...
1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y5qZm5hu
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
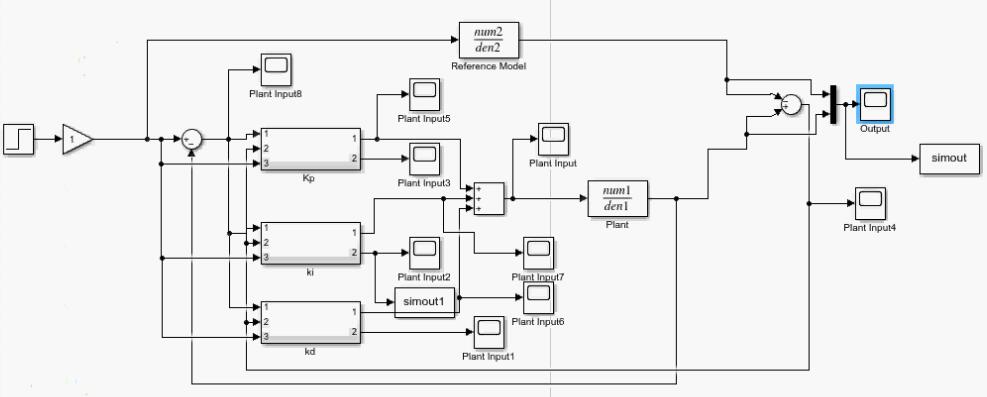
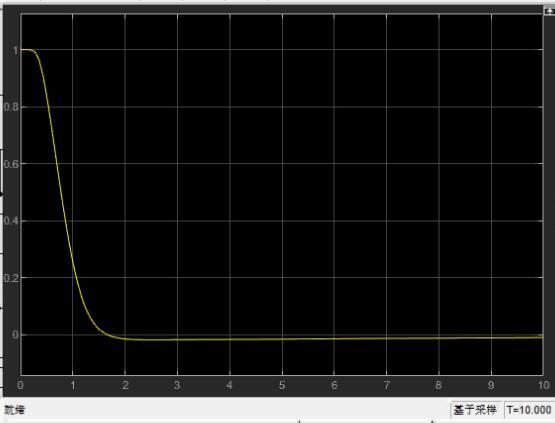
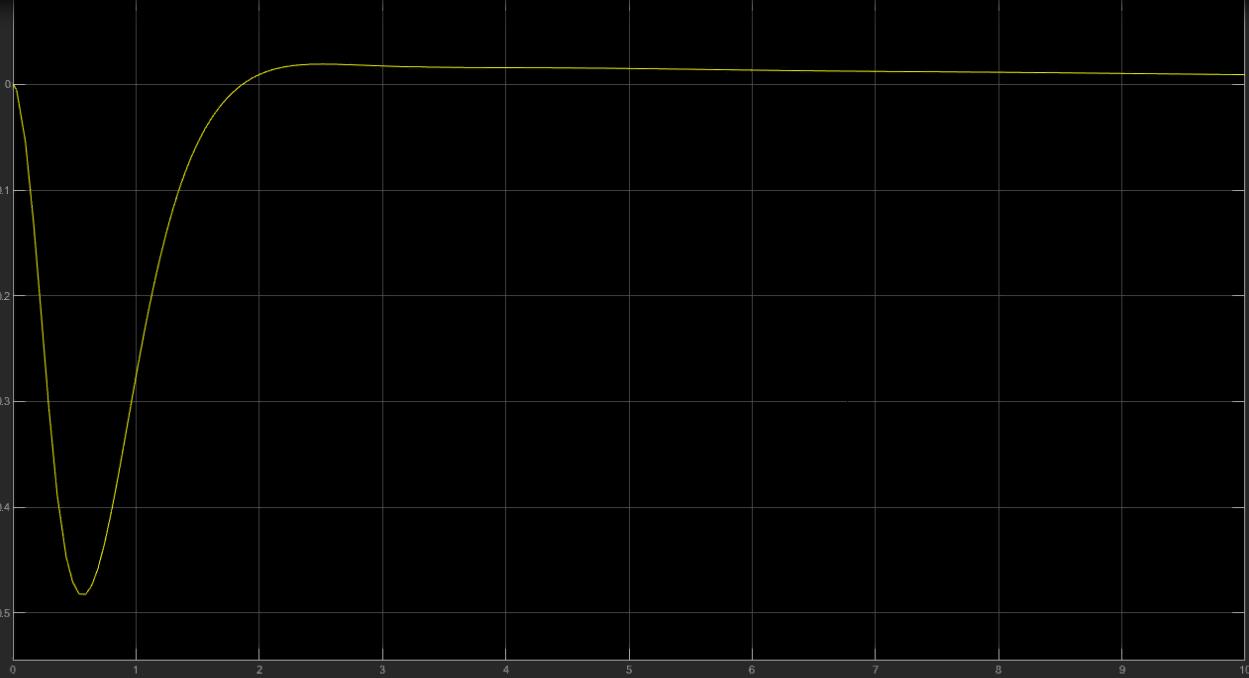
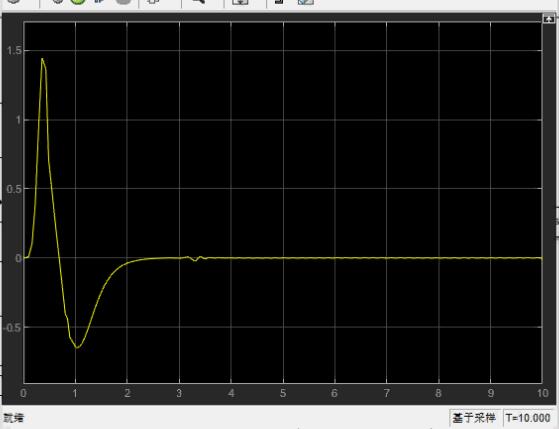
2.部分仿真图预览
3.算法概述
自适应PID控制,是指自适应控制思想与常规PID控制器相结合形成的自适应PID控制或自校正PID控制技术,人们统称为自适应PID控制。
最常用的自适应控制算法有:最小方差自适应PID控制、极点配置自适应PID控制和零极点对消的自适应PID控制。
最小方差自适应PID控制的基本思想是:在每个采样周期,以系统偏差的最小方差极小化为性能指标进行系统品质评价,通过引入在线辨识的最小二乘算法估计未知过程参数,依此来计算各采样时刻的自适应PID控制量u(t)。
极点配置自适应PID控制的基本思想是:按照某种优化策略选择期望闭环极点分布,在每个采样周期,通过加权递推最小二乘法显式地估计过程参数,并结合PID控制规律,求得含未知参数q0、q1和q2的系统闭环方程,然后利用系统特征多项式与期望特征多项式的恒等关系即可在线求得PID控制参数,进而求得各时刻控制器输出u(t)。
零极点对消自适应PID控制的基本思想是:当被控过程参数未知时,在每个采样周期,利用加权递推最小二乘算法显式地辨识过程模型,在以PID控制器传递函数中的零极点对消被控过程传递函数中的部分极零点,由此计算出各时刻的PID控制量,以使得闭环系统运行于良好的工作过程。
除上述外,还有其他自适应PID控制算法。
4.部分源码