



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y56Yl5xt
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
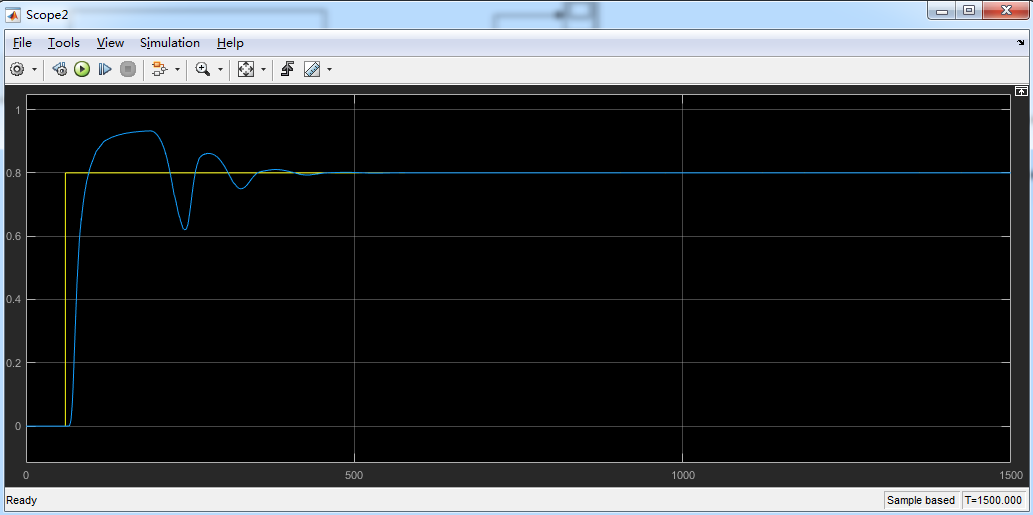
2.部分仿真图预览


3.算法概述
模糊神经网络控制在控制领域里目前已经成为一个研究热点,其原因在于两者之间的互补性质。神经网络和模糊系统均属于无模型的估计器和非线性动力学系统,也是一种处理不确定性、非线性和其它不确定问题(ill-posed problem)的有力工具。但两者之间的特性却存在很大的差异.模糊系统中知识的抽取和表达比较方便,它比较适合于表达那些模糊或定性的知识,其推理方式比较类似于人的思维模式。但是一般说来模糊系统缺乏自学习和自适应能力,要设计和实现模糊系统的自适应控制是比较困难的。而神经网络则可直接从样本中进行有效的学习,它具有并行计算、分布式信息存贮、容错能力强以及具备自适应学习功能等一系列优点。正是由于这些优点,神经网络的研究受到广泛的关注并吸引了许多研究工作者的兴趣。
4.部分源码
...............................................................
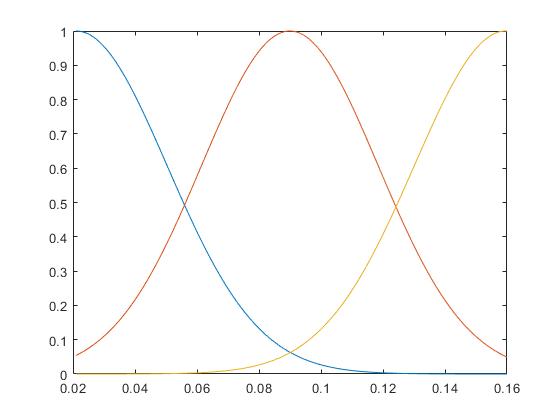
[x1,mf1] = plotmf(patient,'input',1);
[x2,mf2] = plotmf(patient,'input',2);
[x3,mf3] = plotmf(patient,'input',3);
[x4,mf4] = plotmf(patient,'input',4);
[x5,mf5] = plotmf(patient,'input',5);
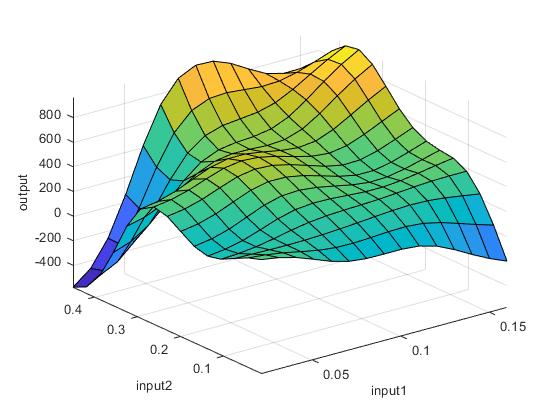
gensurf(patient);
showrule(patient);
figure
plot(x1,mf1);
%Mean Absolute Error
%Mean Absolute Error
%Mean Absolute Error
ty = evalfis(T(:,1:5),patient);
cy = evalfis(C(:,1:5),patient);
t_error = ty - T(:,6);
c_error = cy - C(:,6);
Mean_ABS_training_Error = mae(t_error)
Mean_ABS_Checking_Error = mae(c_error)
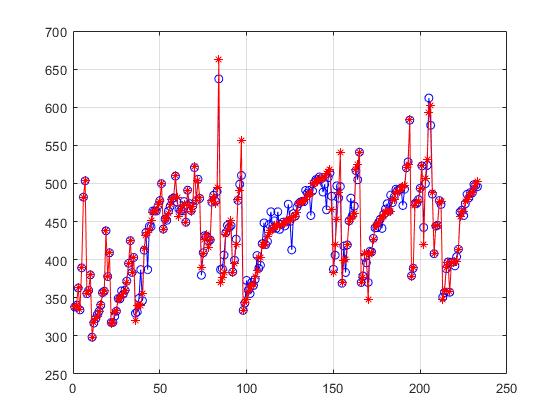
figure;
plot(ty,'b-o');hold on;
plot(T(:,6),'r -*');
grid on;
figure;
plot(cy,'b-o');hold on;
plot(C(:,6),'r -*');
grid on;
08_004_m

































