核心提示:08_083_m,包括程序操作录像+说明文档...
1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZJmXlpZs
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
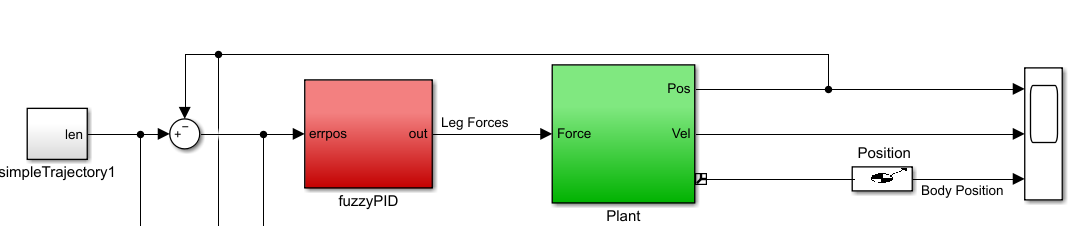
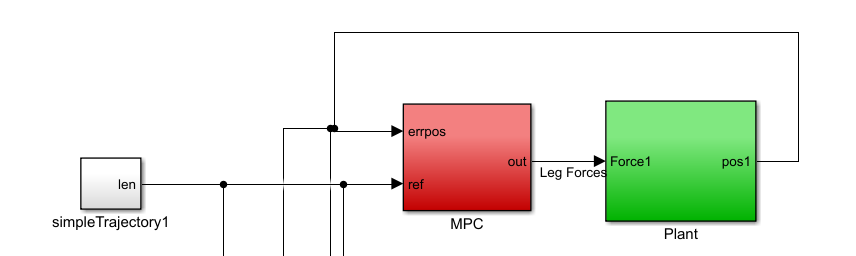
2.部分仿真图预览
3.算法概述
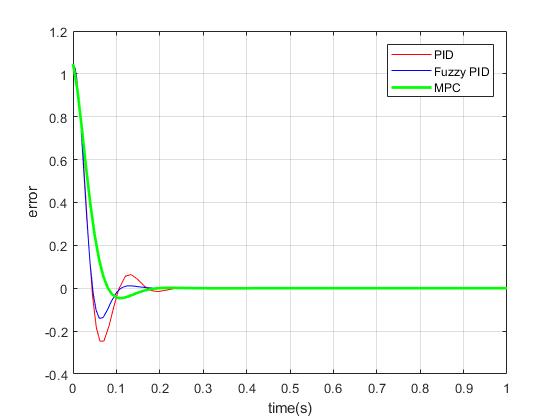
PID控制器,其超调较大,且控制器进入收敛状态时间也最长,。对于模糊PID控制器,其超调小于PID控制器,且收敛速度也较快,因此其性能优于传统的PID控制器。对于MPC控制器,其超调最小,控制器进入稳定状态速度也最快,因此其控制性能最优,但是MPC的上升时间较慢,大约需要0.1s左右完成。但在实际情况下,对控制对象起到影响的主要是控制器的超调和收敛稳定时间两个因素。因此,MPC控制器的控制效果最优,其次为模糊PID控制器,最次是PID控制器。
4.部分源码