



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZJaZmpxy
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
2.部分仿真图预览
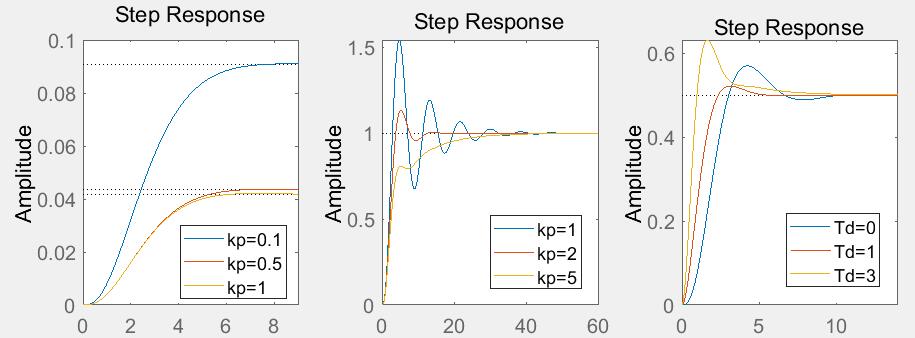
3.算法概述
PID控制器以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当控制对象不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
4.部分源码
.......................................................................
M=0;
switch M
case 0
case 1 %Only PID Control
kp(k)=kp0;
ki(k)=ki0;
kd(k)=kd0;
end
du(k)=kp(k)*xc(1)+kd(k)*xc(2)+ki(k)*xc(3);
u(k)=u_1+du(k);
%Return of parameters
x(1)=du(k);
x(2)=yout(k);
x(3)=y_1;
u_1=u(k);
y_1=yout(k);
ci_3=ci_2;
ci_2=ci_1;
ci_1=ci;
bi_3=bi_2;
bi_2=bi_1;
bi_1=bi;
w_3=w_2;
w_2=w_1;
w_1=w;
xc(1)=error(k)-error_1; %Calculating P
xc(2)=error(k)-2*error_1+error_2; %Calculating D
xc(3)=error(k); %Calculating I
error_2=error_1;
error_1=error(k);
kp_1=kp(k);
kd_1=kd(k);
ki_1=ki(k);
end
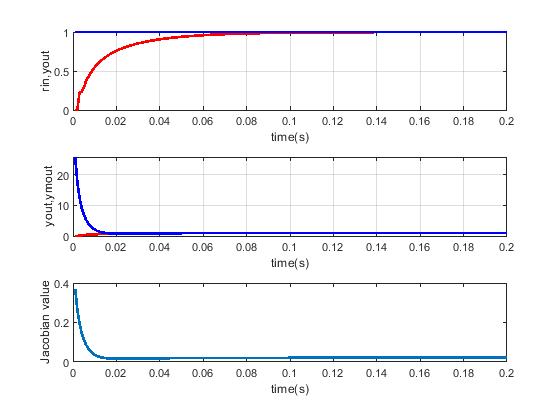
figure(1);
subplot(311);
plot(time,yout,'r','linewidth',2);
hold on;
plot(time,rin,'b','linewidth',2);
grid on;
xlabel('time(s)');
ylabel('rin,yout');
subplot(312);
plot(time,yout,'r','linewidth',2);
hold on
plot(time,ymout,'b','linewidth',2);
grid on;
xlabel('time(s)');
ylabel('yout,ymout');
subplot(313);
plot(time,dyout,'linewidth',2);
xlabel('time(s)');
ylabel('Jacobian value');
figure(2);
subplot(311);
plot(time,kp,'g','linewidth',2);
xlabel('time(s)','linewidth',2);
ylabel('kp');
subplot(312);
plot(time,ki,'g','linewidth',2);
xlabel('time(s)');
ylabel('ki');
subplot(313);
plot(time,kd,'g','linewidth',2);
xlabel('time(s)');
ylabel('kd');
disp('kp整定值');round(1e3*kp(end))
disp('ki整定值');round(1e3*ki(end))
disp('kd整定值');round(1e3*kd(end))
----------------------------------------------------------------
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2023/03/19 20:45:54
// Design Name:
// Module Name: tops
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
.............................................................
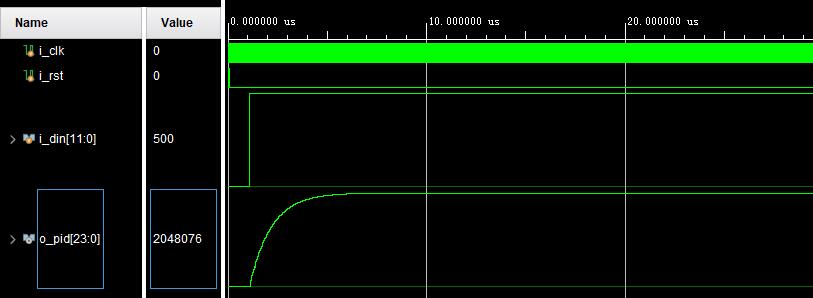
//这个参数是MATLAB RBF参数整定得到的结果,运行main2.m得到参数值
parameter Kp = 12'd75;
parameter Kd = 12'd51;
parameter Ki = 12'd150;
input i_clk;
input i_rst;
input signed[11:0]i_din;
output signed[23:0]o_pid;
reg signed[11:0]o_error;
always @(posedge i_clk or posedge i_rst)
begin
if(i_rst)
begin
o_error <= 12'd0;
end
else begin
o_error <= i_din-o_pid[23:12];
end
end
.....................................................................
08_038_m

































