1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZJmVmJlu
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
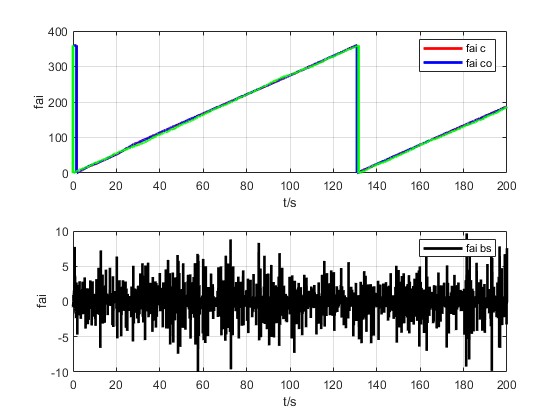
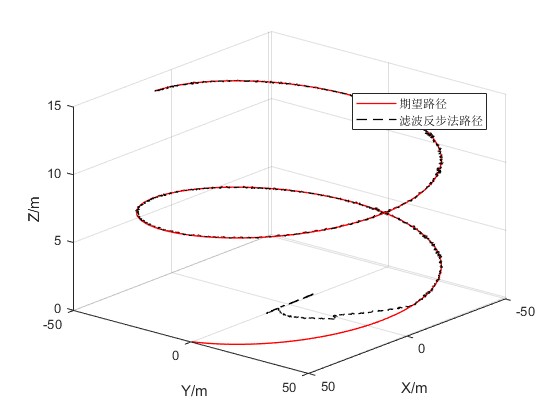
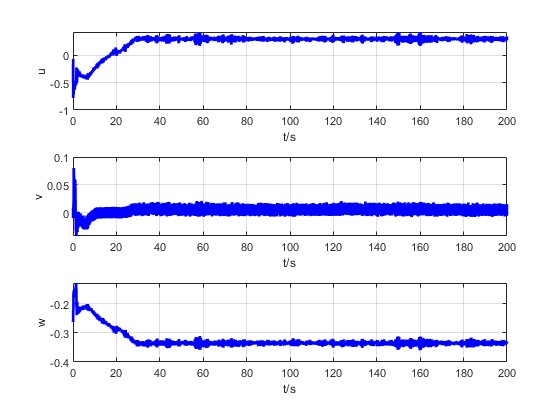
2.部分仿真图预览
3.算法概述
自主水下航行器(Autonomous Underwater Vehicle,AUV)是一种具有自主性、灵活性、隐蔽性等优点的智能化设备,广泛应用于水下勘探、监测、搜救等任务。在AUV的运动控制中,需要考虑到水下环境的复杂性和不确定性,如水流、深度、海浪等因素都会对AUV的运动控制产生影响。因此,如何设计一种能够有效应对水下环境干扰的多自由度AUV运动控制算法是一个重要的问题。
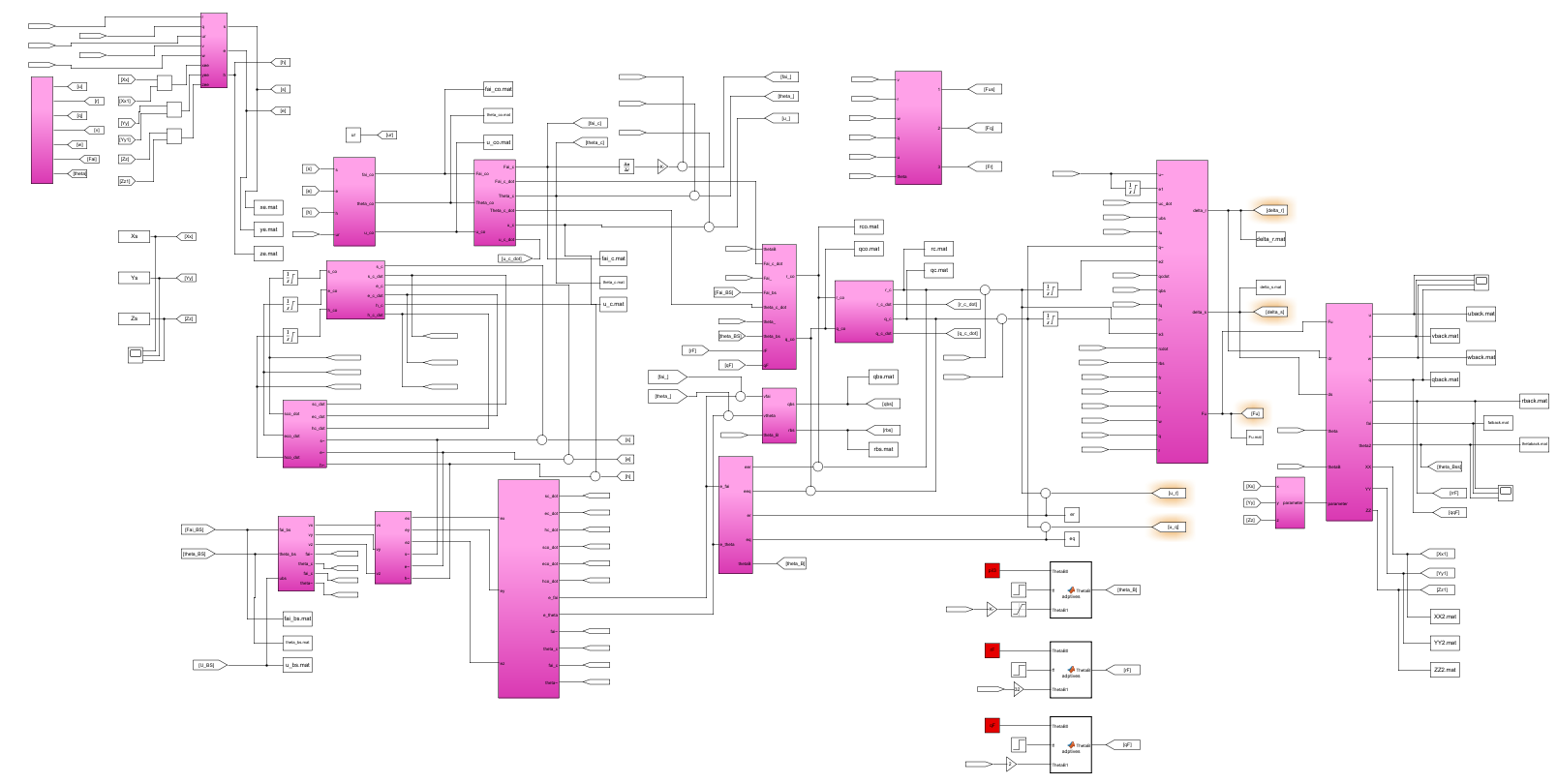
基于万能逼近原理自适应模糊控制算法的多自由度AUV运动控制抗干扰补偿算法采用了自适应模糊控制和抗干扰补偿技术,其主要思路如下:
建立多自由度AUV的数学模型,包括姿态、速度、加速度等状态变量,以及控制输入变量,如推力、转矩等。这是设计任何控制算法的第一步,在AUV的运动控制中,需要考虑到多自由度的运动状态变量,这包括位置、速度、角度、角速度和加速度等多个方面,同时需要考虑到控制输入变量,如推力、转矩等。
设计自适应模糊控制器,该控制器包括模糊推理机和自适应机制两部分。模糊推理机用于将输入的状态变量映射为控制输入,自适应机制用于不断更新模糊规则的参数,以适应不同的工作环境和干扰情况。模糊控制器是一种基于模糊推理的控制器,通过模糊推理机将输入的状态变量映射成为控制输入,以实现对多自由度AUV的控制。而自适应机制是指通过对模糊规则参数的不断调整来适应不同的环境和干扰情况,从而实现控制系统的自适应性和鲁棒性。具体地,自适应机制可以通过反馈控制来不断更新模糊规则中的参数,使其能够更加准确地描述AUV的运动状态和控制输入之间的关系。
设计抗干扰补偿器,该补偿器用于抵消水下环境的干扰,包括水流、深度、海浪等因素。水下环境的复杂性和不确定性,使得AUV的运动控制受到各种干扰,如水流、深度变化、海浪等因素都会影响AUV的运动轨迹和控制输入。因此,设计一种有效的抗干扰补偿器是非常重要的。抗干扰补偿器可以通过对水下环境的实时监测和分析,采用补偿控制策略对控制输入进行调整,以抵消水下环境干扰,保证AUV的运动控制精度和稳定性。
将自适应模糊控制器和抗干扰补偿器组合起来,形成多自由度AUV的运动控制系统。在控制过程中,自适应模糊控制器根据当前状态变量的值计算出控制输入,抗干扰补偿器则根据环境的干扰程度对控制输入进行补偿,从而实现多自由度AUV的精确控制。
4.部分源码