



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZJWXk5xt
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
2.部分仿真图预览
3.算法概述
H∞控制是一种具有很好鲁棒性的设计方法,具有设计思想明确、控制效果好等优点,尤其适用于模型摄动的多输入多输出(MIMO)系统。H∞控制在控制理论、设计方法及应用等方面,经过多年不断发展和完善,已成为一种具有较完整体系的鲁棒控制理论。为适应控制系统稳定性、自适应性、智能化及工程化的更高要求,基于线性矩阵不等式(LMI)的H∞控制、非线性H∞控制以及H∞控制与神经网络和模糊控制结合,成为近年来H∞控制研究的热点。随着H∞控制研究的深入,其存在的诸如理论复杂、计算量大和参数摄动范围有限等问题将会逐步得到解决,适用范围也会更广、应用前景会更好。
4.部分源码
.......................................................................................
function edit3_Callback(hObject, eventdata, handles)
% hObject handle to edit3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit3 as text
% str2double(get(hObject,'String')) returns contents of edit3 as a double
% --- Executes during object creation, after setting all properties.
function edit3_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --- Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
SEL = get(handles.checkbox1,'Value');
kps = str2num(get(handles.edit1,'String'));
kis = str2num(get(handles.edit2,'String'));
kds = str2num(get(handles.edit3,'String'));
Time = str2num(get(handles.edit5,'String'));
ts = 0.001;
J = 0.05;
q = 0.1;
sys = tf(1,[J,q,0]);
dsys = c2d(sys,ts,'z');
[num,den] = tfdata(dsys,'v');
u_1 = 0;
u_2 = 0;
y_1 = 0;
y_2 = 0;
error_1 = 0;
ei = 0;
kp = zeros(Time/ts,1);
ki = zeros(Time/ts,1);
kd = zeros(Time/ts,1);
for k=1:1:Time/ts
time(k) = k*ts;
yd(k) = 1;
y(k) = -den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;
error(k) = yd(k)-y(k);
derror(k) = (error(k)-error_1)/ts;
%kp
P_c1 = kps;
tmpsp(k) = P_c1 + sech(error(k));
if SEL == 0
kp(k)= kps;
end
if SEL == 1
kp(k)= tmpsp(k);
end
%kd
P_d1 = kis;
tmpsd(k) = P_d1 + sech(error(k));
if SEL == 0
kd(k)= kis;
end
if SEL == 1
kd(k)= tmpsd(k);
end
%ki
P_i1 = kds;
tmpsi(k) = P_i1 + sech(error(k));
if SEL == 0
ki(k)= kds;
end
if SEL == 1
ki(k)= tmpsi(k);
end
ei = ei+error(k)*ts;
u(k) = kp(k)*error(k)+kd(k)*derror(k)+ki(k)*ei;
%延迟,参数更新
u_2 = u_1;
u_1 = u(k);
y_2 = y_1;
y_1 = y(k);
error_1 = error(k);
end
if SEL == 0
save pidr1.mat time yd y
end
if SEL == 1
save pidr2.mat time yd y
end
axes(handles.axes1);
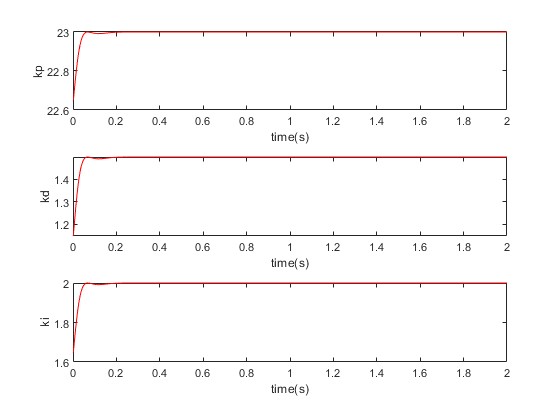
plot(time,kp,'r');
xlabel('time(s)');
ylabel('kp');
axes(handles.axes3);
plot(time,kd,'r');
xlabel('time(s)');
ylabel('kd');
axes(handles.axes4);
plot(time,ki,'r');
xlabel('time(s)');
ylabel('ki');
axes(handles.axes2);
cla reset
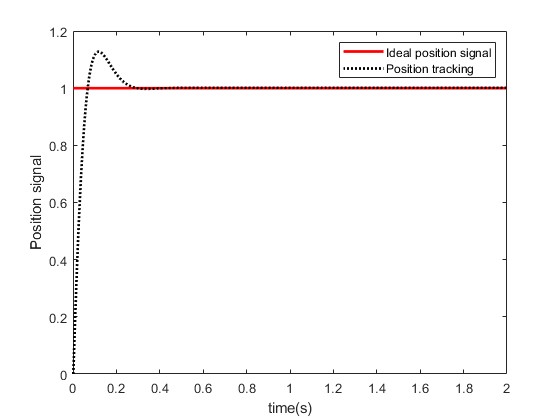
plot(time,yd,'r',time,y,'k:','linewidth',2);
xlabel('time(s)');
ylabel('Position signal');
legend('Ideal position signal','Position tracking');
t1 = (max(y)-mean(yd))/mean(yd);
msgbox(['Over adjust: ',num2str(100*t1),'%',' Kp,Ki,Kd is: ',num2str(kp(end)),'; ',num2str(ki(end)),'; ',num2str(kd(end))]);
% --- Executes on button press in pushbutton2.
function pushbutton2_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
axes(handles.axes2);
cla reset
load pidr1.mat
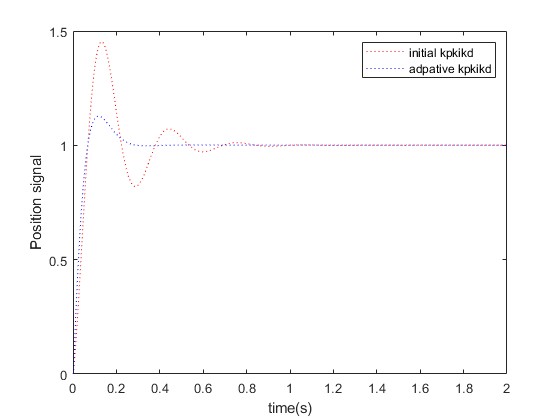
plot(time,y,'r:');
xlabel('time(s)');
ylabel('Position signal');
hold on
load pidr2.mat
plot(time,y,'b:');
xlabel('time(s)');
ylabel('Position signal');
legend('initial kpkikd','adpative kpkikd');
function edit5_Callback(hObject, eventdata, handles)
% hObject handle to edit5 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit5 as text
% str2double(get(hObject,'String')) returns contents of edit5 as a double
% --- Executes during object creation, after setting all properties.
function edit5_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit5 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
save Hinf.mat time yy
% --- Executes on button press in pushbutton6.
function pushbutton6_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton6 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
axes(handles.axes2);
cla reset
load pidr1.mat
plot(time,y,'r:');
xlabel('time(s)');
ylabel('Position signal');
hold on
load pidr2.mat
plot(time,y,'b:');
xlabel('time(s)');
ylabel('Position signal');
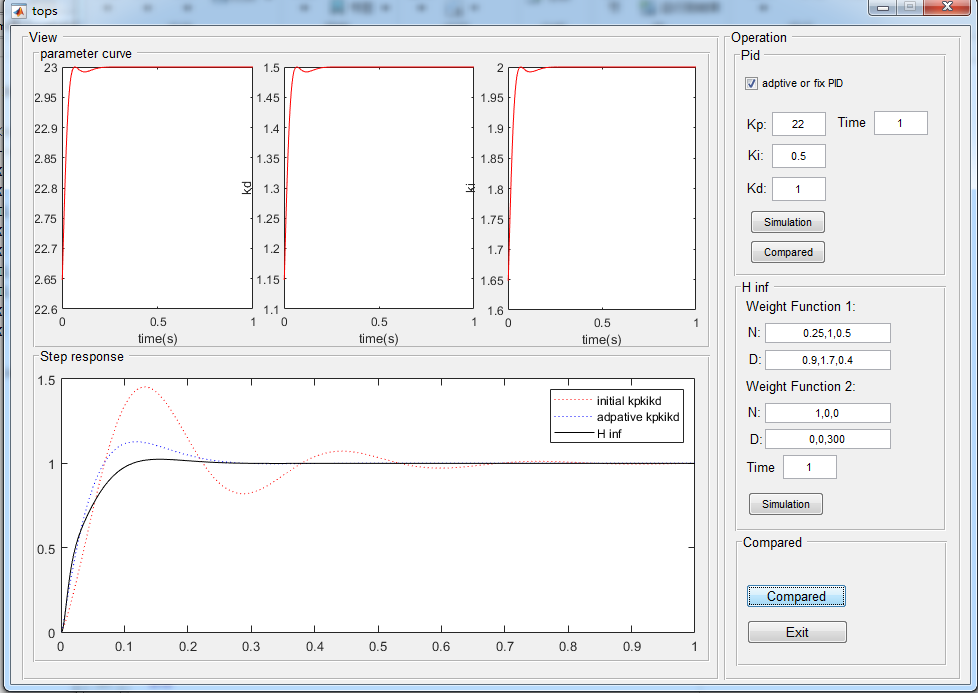
load Hinf.mat
plot(time,yy,'k');
xlabel('time(s)');
ylabel('Position signal');
legend('initial kpkikd','adpative kpkikd','H inf');
08_021_m

































