



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZJWTmZ9p
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
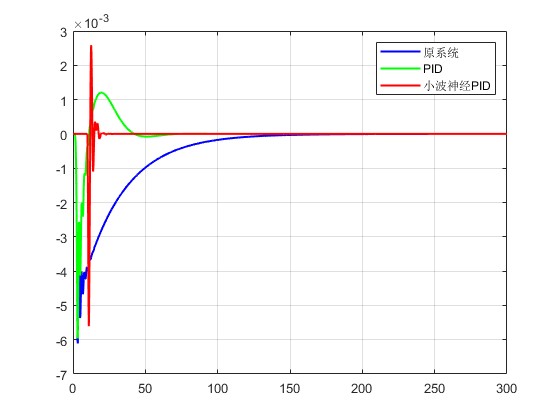
2.部分仿真图预览
3.算法概述
随着电力工业的市场化改革、厂网分开,跨区域 电网的互联电力系统自动控制显得更加重要。电网 的频率稳定是电力系统安全稳定运行的重要因素, 是衡量电网稳定的重要指标。频率异常或频率崩 溃,将对电力系统本身及电力用户带来极为严重的 后果。频率与有功功率相关,电力系统中有功功率 的需求和产生上的任何变化都会反映到系统频率的 变化上。在跨区域电网的互联电力系统中,频率控 制更加复杂、导致的问题更严重。
频率是电力系统电能质量的三大指标之一,也是电气设备设计和制造的基本技术参数。电力系统频率超过允许的偏移值就会影响设备的安全运行,还可能造成供电设备和用电设备的损坏;频率质量的优劣直接影响电力系统的安全、稳定、经济、优质运行。电力系统频率是靠电力系统内并联运行的所有发电机机组发出的有功功率总和与系统内所有负荷消耗(包括网损)的有功功率总和之间的平衡来维持的,电力系统中有功功率的需求和产生上的任何变化都会反映到系统频率的变化上。在跨区域电网的互联电力系统中,频率控制更加复杂,导致的问题更严重。随着国民经济的不断发展和电力系统规模的不断增大,对频率质量的要求将越来越高。所谓负荷频率控制,是指通过控制系统内并联运行机组输入的总功率等于系统负荷在额定频率下所消耗的有功功率将电力系统频率控制在允许范围内的过程。
4.部分源码
.............................................................
%后面的函数就是文件夹中的几个子函数,这里不做进一步的注释了。
%初始化函数
function [sys,x0,str,ts] = func_initialize()
sizes = simsizes; % 读入模板,得出默认的控制量
sizes.NumContStates = 0;
sizes.NumDiscStates = 3;
sizes.NumOutputs = 4+5*6;
sizes.NumInputs = 9+15*6;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = zeros(3,1);
str = [];
ts = [0.0005 0];
%离散状态变量更新函数
function sys = func_news(u)
sys=[u(1)-u(2);u(1);u(1)+u(3)-2*u(2)];
%输出量计算函数
function sys = func_wnn_out(t,x,u,K_pid,xite);
c3 = reshape(u(7 : 6+3*6) ,3,6);
c2 = reshape(u(7+5*6 : 6+8*6) ,3,6);
c1 = reshape(u(7+10*6: 6+13*6),3,6);
b3 = u(7+3*6 : 6+4*6);
b2 = u(7+8*6 : 6+9*6);
b1 = u(7+13*6: 6+14*6);
w3 = u(7+4*6 : 6+5*6);
w2 = u(7+9*6 : 6+10*6);
w1 = u(7+14*6: 6+15*6);
xx=u([6;4;5]);
if t==0
c1 = 30*ones(3,6);
b1 = 80*ones(6,1);
w1 = 2*ones(6,1);
K_pid0 = K_pid;
else
K_pid0=u(end-2:end);
end
%激发函数
for j=1: 6
h(j,1)=(1 - norm(xx-c1(:,j))^2/(b1(j)*b1(j))) * exp(-norm(xx-c1(:,j))^2/(2*b1(j)*b1(j)));
end
dym = u(4)-w1'*h;
w = w1 + xite*dym*h + 0.05*(w1-w2) + 0.05*(w2-w3);
for j=1:6
d_bi(j,1)=xite*dym*w1(j)*h(j)*(b1(j)^(-3))*norm(xx-c1(:,j))^2;
d_ci(:,j)=xite*dym*w1(j)*h(j)*(xx-c1(:,j))*(b1(j)^(-2));
end
bi =b1 + d_bi + 0.05 * (b1-b2) + 0.05*(b2-b3);
ci =c1 + d_ci + 0.05 * (c1-c2) + 0.05*(c2-c3);
dJac=sum(w.*h.*(-xx(1)+ci(1,:)')./bi.^2);
KK=K_pid0+u(1)*dJac*[0.1;0.1;0.1].*x;
sys=[u(6)+KK'*x; KK; ci(:); bi(:); w(:)];
08_011_m

































