



核心提示:0Z_006m,包括程序操作录像...
1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Zpecm5pq
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
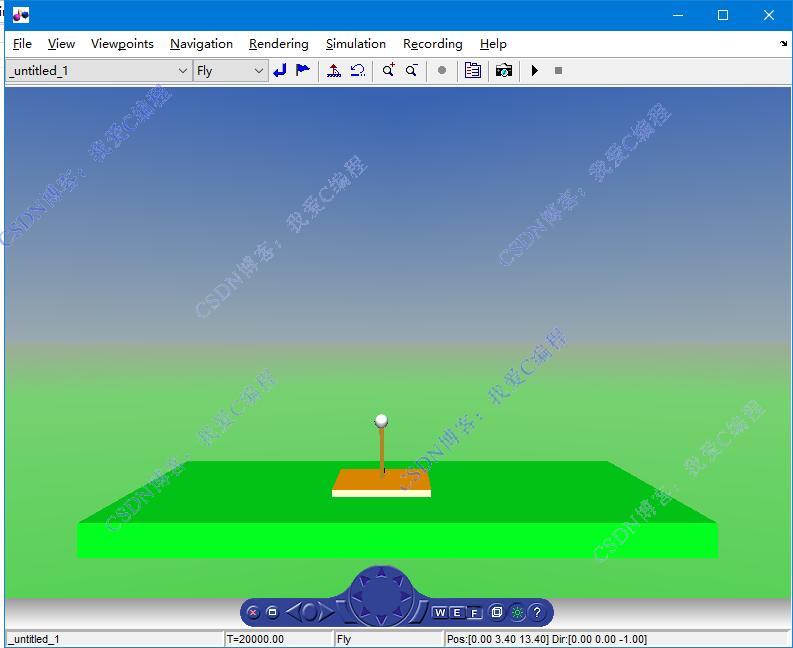
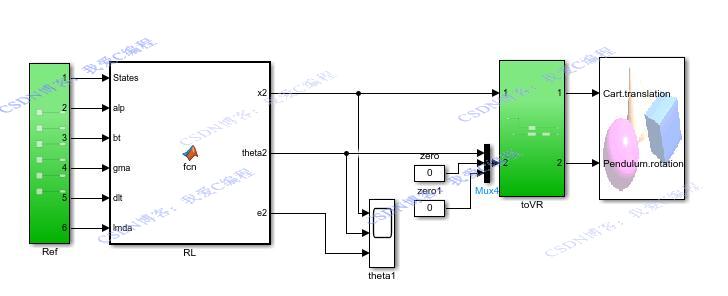
2.部分仿真图预览
3.算法概述
基于强化学习的倒立摆平衡车控制系统是一个典型的动态系统控制问题,它通过不断的学习和决策过程,使倒立摆维持在垂直平衡位置,即使受到外力干扰或系统内部噪声影响。强化学习在此类问题中的应用,展示了其在解决复杂控制问题中的强大潜力。
4.部分源码
---

































