核心提示:A423,包括程序操作录像...
1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZJWbkphr
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
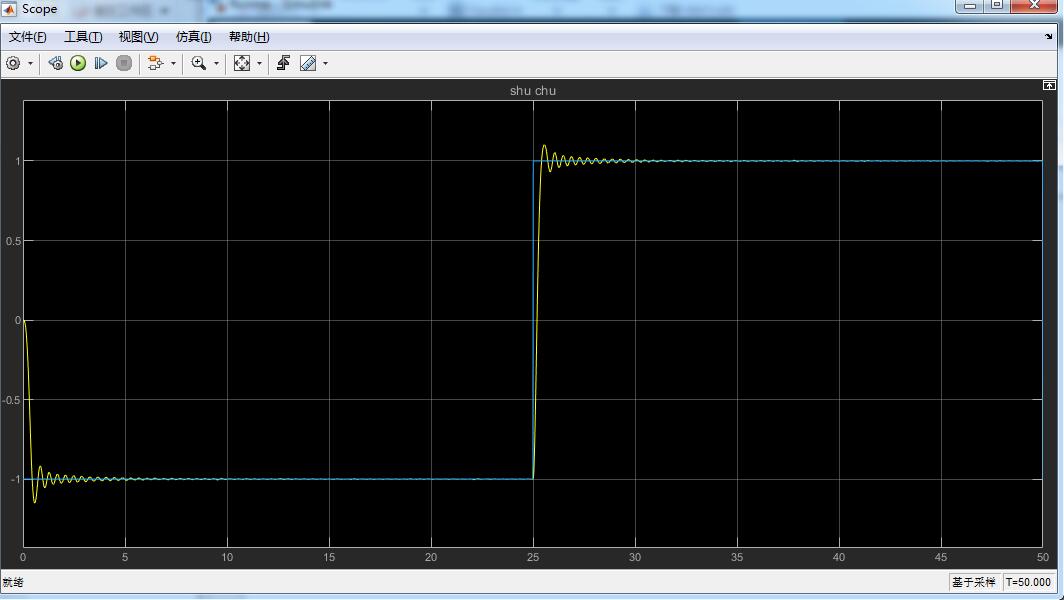
2.部分仿真图预览
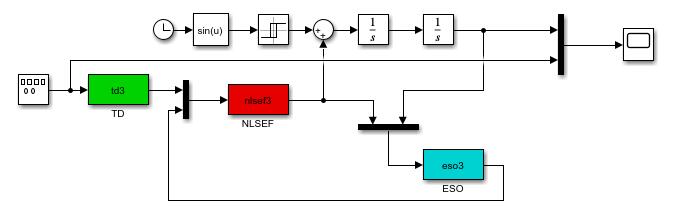
3.算法概述
自抗扰控制器主要由三部分组成:跟踪微分器(tracking differentiator),扩展状态观测器 (extended state observer) 和非线性状态误差反馈控制律(nonlinear state error feedback law)。自抗扰控制器自PID控制器演变过来,采取了PID误差反馈控制的核心理念。传统PID控制直接取参考给定与输出反馈之差作为控制信号,导致出现响应快速性与超调性的矛盾。
4.部分源码