



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/aJWUmJdt
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
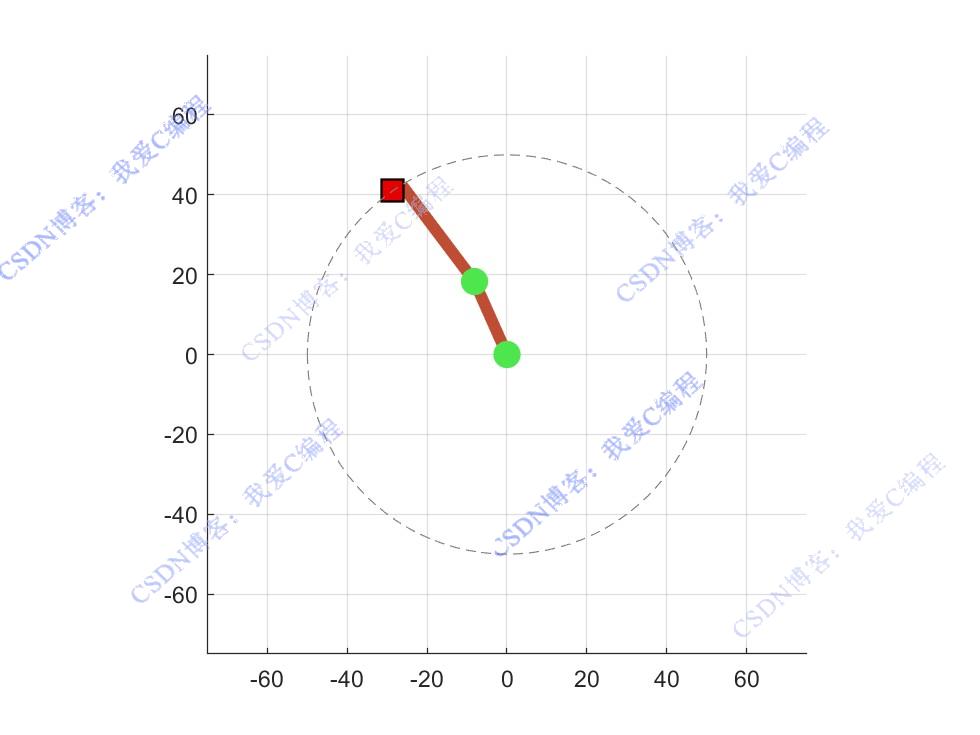
2.部分仿真图预览
3.算法概述
二自由度(2DoF)机械臂运动控制是机器人领域的重要研究内容。基于Q-learning强化学习的 2DoF机械臂运动控制系统旨在让机械臂通过与环境交互,自主学习最优的运动策略以完成特定任务,如到达目标位置。Q-learning 是一种无模型的强化学习算法,它通过不断更新Q值(动作价值)来寻找最优策略。
4.部分源码
.......................................................
stepa=2;
figure
plot(1:stepa:Miter, Rwdm(1:stepa:end),'-r>',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
hold on
xlabel('Epoch');
ylabel('奖励值');
figure
plot(1:stepa:Miter, Action_set(1,1:stepa:end),'-r>',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
hold on
plot(1:stepa:Miter, Action_set(2,1:stepa:end),'-mo',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.5,0.9,0.0]);
hold on
xlabel('Epoch');
ylabel('动作值');
0Z_015m
---

































