



核心提示:A79,包括程序操作录像...
1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y5iUlp1s
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
2.部分源码
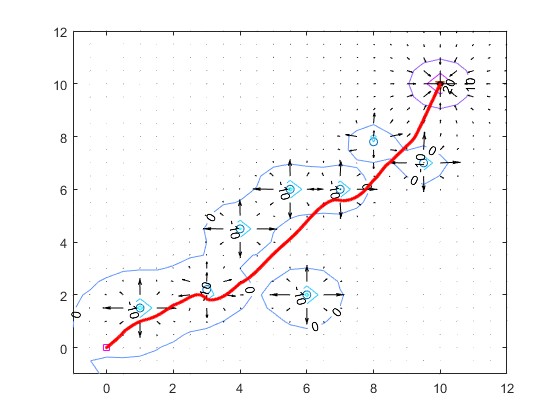
3.部分仿真图预览
4.算法概述
人工势场法原理是:首先构建一个人工虚拟势场,该势场由两部分组成,一部分是目标点对移动机器人产生的引力场,方向由机器人指向目标点,另一部分是障碍物对移动机器人产生的斥力场,方向为由障碍物指向机器人。运行空间的总势场为斥力场和引力场共同叠加作用,从而通过引力和斥力的合力来控制移动机器人的移动。
物理学的势(potential),也称做“位”,是一种能量概念。在保守场里,把一个单位质点(如重力场中的单位质量,静电场中的单位正电荷)从场中的某一点A移到参考点,场力所作的功是一个定值。也就是说,在保守场中,单位质点在A点与参考点的势能之差是一定的,人们把这个势能差定义为保守场中A点的“势”。
人工势场法路径规划是由Khatib提出的一种虚拟力法(Oussama Khatib,Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. Proc of The 1985 IEEE.)。它的基本思想是将机器人在周围环境中的运动,设计成一种抽象的人造引力场中的运动,目标点对移动机器人产生“引力”,障碍物对移动机器人产生“斥力”,最后通过求合力来控制移动机器人的运动。应用势场法规划出来的路径一般是比较平滑并且安全,但是这种方法存在局部最优点问题。

































