



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y5qUk5tw
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
2.部分仿真图预览
3.算法概述
无人机的航迹跟踪控制,主要通过无人机的飞行控制系统来实现。无人机之所以能发挥如此巨大的作用,除了在气动力、结构以及发动机方面取得了重大突破外,在无人机上安装有各种不同功能的飞行控制系统也是至关重要的。飞行控制系统一般由不同功能的分系统或部件组成,能够控制无人机重心运动(航迹运动)、角运动和飞行速度等,并能改善无人机飞行品质与保障无人机的飞行安全。其基本功能是实现无人机的自动飞行,改善无人机的动态性能。
4.部分源码
。。。。。。。。。。。。。。。。。。。。。。。。。。。
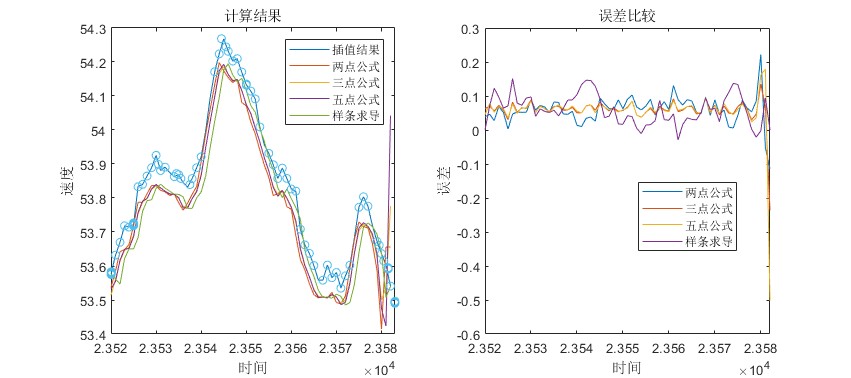
%第二张图,绘制误差
subplot(1,2,2);
plot(time_inter,error_two);
hold on;
plot(time_inter,error_three);
hold on;
plot(time_inter,error_five);
hold on;
plot(time_inter,error_spline);
title('误差比较')
xlabel('时间');
ylabel('误差');
legend('两点公式','三点公式','五点公式','样条求导');
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%两点公式,计算速度
%传入路程的数组,返回相同大小的速度数组
%路程的数组应该是递增的数组
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function result=two_point(list,step)
%获取数组大小
num=size(list);
number=num(1);
result=list;
%除了最后一个速度,其它的速度都是后面的减去前面的路程再除以时间间隔
for i=1:number-1
result(i)= (list(i+1)-list(i))/step;
end
%最后一个速度等于前面的速度,这是两点法的缺陷
result(number)=result(number-1);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%三点公式,计算速度
%传入路程的数组,返回相同大小的速度数组
%路程的数组应该是递增的数组
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function result=three_point(list,step)
%获取数组大小
num=size(list);
number=num(1);
result=list;
%除了最后一个和第一个其它的都要用相邻两个点的数据来算
for i=2:number-1
result(i)=(list(i+1)-list(i-1))/(2*step);
end
%第一个点和最后一个点要分开计算
result(1)=(list(1)*(-3)+list(2)*4-list(3))/(2*step);
result(number)=(list(number-2)-4*list(number-1)+3*list(number))/(2*step);
end
。。。。。。。。。。。。。。。。。
A121

































