



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y5qWm5dy
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
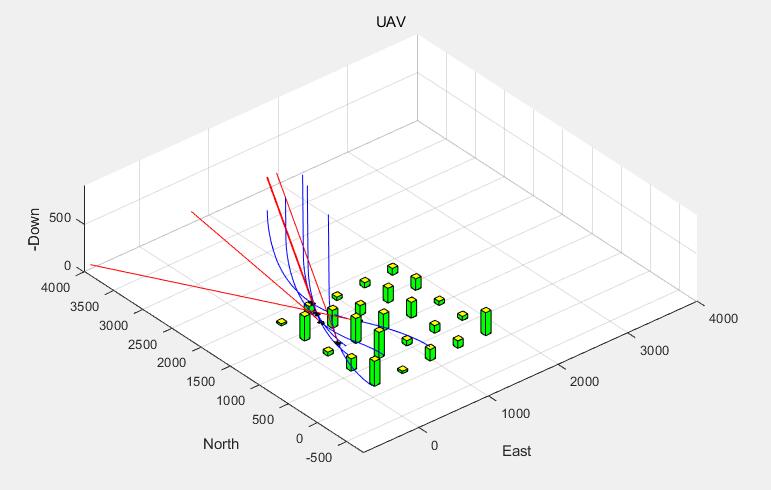
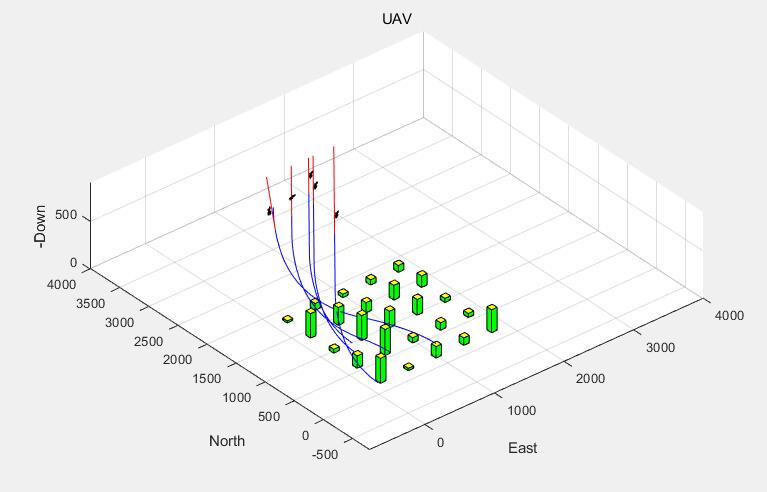
2.部分仿真图预览
3.算法概述
集中式控制无人机集群方案采用飞思实验室自研的点对多点高带宽数据链,针对不同的载荷和应用场景实现最大30架无人机控制。在集中式控制体系中,由地面控制站中的操作人员制定任务分配方案和无人机具体飞行航路,无人机本身不具备决策能力,完全按照地面控制站发出的任务指令和航路执行任务。
4.部分源码
addpath 'data'
addpath 'uavA1'
uavW = 1;
save('uavW.mat','uavW');
sim('New_mavsim_chap12');
ii = 1;
eval(['x' num2str(ii) '= x;'])
eval(['path' num2str(ii) '= path;'])
eval(['waypoints' num2str(ii) '= waypoints;'])
save('x1.mat','x1','path1','waypoints1');
%----------------
clear;
uavW = 2;
uavi = uavW;
save('uavW.mat','uavW');
sim('New_mavsim_chap12');
ii = 2;
eval(['x' num2str(ii) '= x;'])
eval(['path' num2str(ii) '= path;'])
eval(['waypoints' num2str(ii) '= waypoints;'])
save('x2.mat','x2','path2','waypoints2');
%----------------
clear;
uavW = 3;
save('uavW.mat','uavW');
sim('New_mavsim_chap12');
ii = 3;
eval(['x' num2str(ii) '= x;'])
eval(['path' num2str(ii) '= path;'])
eval(['waypoints' num2str(ii) '= waypoints;'])
save('x3.mat','x3','path3','waypoints3');
%----------------
clear;
uavW = 4;
save('uavW.mat','uavW');
sim('New_mavsim_chap12');
ii = 4;
eval(['x' num2str(ii) '= x;'])
eval(['path' num2str(ii) '= path;'])
eval(['waypoints' num2str(ii) '= waypoints;'])
save('x4.mat','x4','path4','waypoints4');
%----------------
clear;
uavW = 5;
save('uavW.mat','uavW');
sim('New_mavsim_chap12');
ii = 5;
eval(['x' num2str(ii) '= x;'])
eval(['path' num2str(ii) '= path;'])
eval(['waypoints' num2str(ii) '= waypoints;'])
save('x5.mat','x5','path5','waypoints5');
% Show part
addpath 'uavShow'
sim('mavsim_show');
A132

































