



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y56Wk5Zw
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
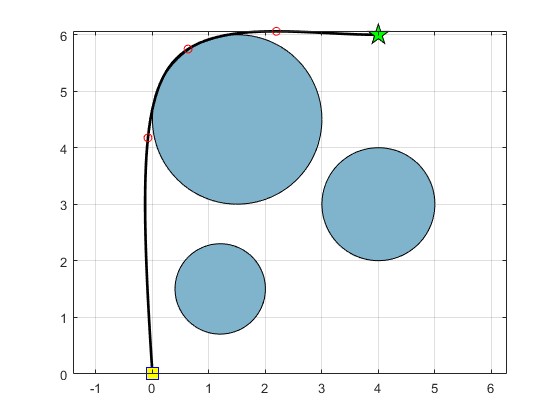
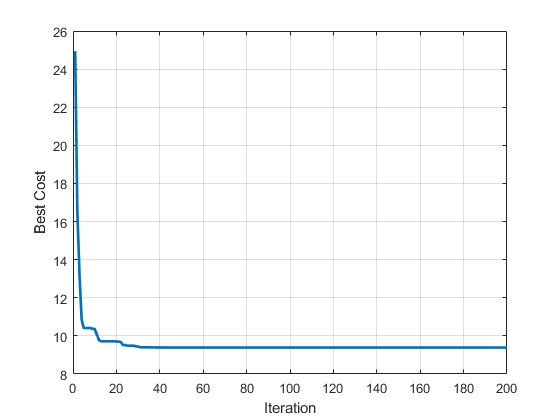
2.部分仿真图预览
3.算法概述
在求解TSP这种整数规划问题的时候, PSO显然与ACO不同, PSO需要对算法本身进行一定的修改, 毕竟PSO刚开始是应用在求解连续优化问题上的. 在路径规划中,我们将每一条路径规划为一个粒子,每个粒子群群有 n 个粒 子,即有 n 条路径,同时,每个粒子又有 m 个染色体,即中间过渡点的个数,每 个点(染色体)又有两个维度(x,y),在代码中用 posx 和 posy 表示一个种群。 通过每一代的演化,对粒子群进行演化操作,选择合适个体(最优路径)。
4.部分源码
...........................................................................
MaxIt=200; % Maximum Number of Iterations
nPop=150; % Population Size (Swarm Size)
w=1; % Inertia Weight
wdamp=0.98; % Inertia Weight Damping Ratio
c1=1.5; % Personal Learning Coefficient
c2=1.5; % Global Learning Coefficient
alpha=0.1;
VelMax.x=alpha*(VarMax.x-VarMin.x); % Maximum Velocity
VelMin.x=-VelMax.x; % Minimum Velocity
VelMax.y=alpha*(VarMax.y-VarMin.y); % Maximum Velocity
VelMin.y=-VelMax.y; % Minimum Velocity
%% Initialization
% Create Empty Particle Structure
empty_particle.Position=[];
empty_particle.Velocity=[];
empty_particle.Cost=[];
empty_particle.Sol=[];
empty_particle.Best.Position=[];
empty_particle.Best.Cost=[];
empty_particle.Best.Sol=[];
% Initialize Global Best
GlobalBest.Cost=inf;
% Create Particles Matrix
particle=repmat(empty_particle,nPop,1);
% Initialization Loop
for i=1:nPop
% Initialize Position
if i > 1
particle(i).Position=CreateRandomSolution(model);
else
% Straight line from source to destination
xx = linspace(model.xs, model.xt, model.n+2);
yy = linspace(model.ys, model.yt, model.n+2);
particle(i).Position.x = xx(2:end-1);
particle(i).Position.y = yy(2:end-1);
end
% Initialize Velocity
particle(i).Velocity.x=zeros(VarSize);
particle(i).Velocity.y=zeros(VarSize);
% Evaluation
[particle(i).Cost, particle(i).Sol]=CostFunction(particle(i).Position);
% Update Personal Best
particle(i).Best.Position=particle(i).Position;
particle(i).Best.Cost=particle(i).Cost;
particle(i).Best.Sol=particle(i).Sol;
% Update Global Best
if particle(i).Best.Cost<GlobalBest.Cost
GlobalBest=particle(i).Best;
end
end
% Array to Hold Best Cost Values at Each Iteration
BestCost=zeros(MaxIt,1);
%% PSO Main Loop
for it=1:MaxIt
for i=1:nPop
% Update Velocity
particle(i).Velocity.x = w*particle(i).Velocity.x ...
+ c1*rand(VarSize).*(particle(i).Best.Position.x-particle(i).Position.x) ...
+ c2*rand(VarSize).*(GlobalBest.Position.x-particle(i).Position.x);
% Update Velocity Bounds
particle(i).Velocity.x = max(particle(i).Velocity.x,VelMin.x);
particle(i).Velocity.x = min(particle(i).Velocity.x,VelMax.x);
% Update Position
particle(i).Position.x = particle(i).Position.x + particle(i).Velocity.x;
% Velocity Mirroring
OutOfTheRange=(particle(i).Position.x<VarMin.x | particle(i).Position.x>VarMax.x);
particle(i).Velocity.x(OutOfTheRange)=-particle(i).Velocity.x(OutOfTheRange);
% Update Position Bounds
particle(i).Position.x = max(particle(i).Position.x,VarMin.x);
particle(i).Position.x = min(particle(i).Position.x,VarMax.x);
% y Part
% Update Velocity
particle(i).Velocity.y = w*particle(i).Velocity.y ...
+ c1*rand(VarSize).*(particle(i).Best.Position.y-particle(i).Position.y) ...
+ c2*rand(VarSize).*(GlobalBest.Position.y-particle(i).Position.y);
% Update Velocity Bounds
particle(i).Velocity.y = max(particle(i).Velocity.y,VelMin.y);
particle(i).Velocity.y = min(particle(i).Velocity.y,VelMax.y);
% Update Position
particle(i).Position.y = particle(i).Position.y + particle(i).Velocity.y;
% Velocity Mirroring
OutOfTheRange=(particle(i).Position.y<VarMin.y | particle(i).Position.y>VarMax.y);
particle(i).Velocity.y(OutOfTheRange)=-particle(i).Velocity.y(OutOfTheRange);
% Update Position Bounds
particle(i).Position.y = max(particle(i).Position.y,VarMin.y);
particle(i).Position.y = min(particle(i).Position.y,VarMax.y);
% Evaluation
[particle(i).Cost, particle(i).Sol]=CostFunction(particle(i).Position);
% Update Personal Best
if particle(i).Cost<particle(i).Best.Cost
particle(i).Best.Position=particle(i).Position;
particle(i).Best.Cost=particle(i).Cost;
particle(i).Best.Sol=particle(i).Sol;
% Update Global Best
if particle(i).Best.Cost<GlobalBest.Cost
GlobalBest=particle(i).Best;
end
end
end
% Update Best Cost Ever Found
BestCost(it)=GlobalBest.Cost;
% Inertia Weight Damping
w=w*wdamp;
% Show Iteration Information
if GlobalBest.Sol.IsFeasible
Flag=' *';
else
Flag=[', Violation = ' num2str(GlobalBest.Sol.Violation)];
end
disp(['Iteration ' num2str(it) ': Best Cost = ' num2str(BestCost(it)) Flag]);
% Plot Solution
figure(1);
PlotSolution(GlobalBest.Sol,model);
pause(0.01);
end
A237

































