



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y52XmZ1v
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
2.部分仿真图预览
3.算法概述
4.部分源码
if sel == 1
%输入的CR和h
%分别仅输入CR和h,使其达到解耦的结果
[yy,Zbest] = func_train_onlineHPSO(iteration,Sizes,CR,h);
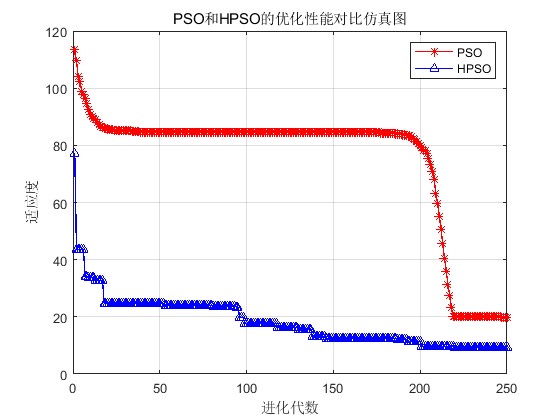
figure(1)
plot(yy,'LineWidth',2);grid on;
xlabel('进化代数');
ylabel('适应度');
individual=Zbest;
save trainHPSO.mat Zbest yy
else
load trainHPSO.mat
figure(1)
plot(yy,'LineWidth',2);grid on;
xlabel('进化代数');
ylabel('适应度');
individual=Zbest;
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%以下为RBF%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
w11=reshape(individual(1:6),3,2);
w12=reshape(individual(7:12),3,2);
w13=reshape(individual(13:18),3,2);
w21=individual(19:27);
w22=individual(28:36);
w23=individual(37:45);
rate1=0.006;rate2=0.001; %学习率
k=0.3;K=3;
y_1=zeros(3,1);y_2=y_1;y_3=y_2; %输出值
u_1=zeros(3,1);u_2=u_1;u_3=u_2; %控制率
h1i=zeros(3,1);h1i_1=h1i; %第一个控制量
h2i=zeros(3,1);h2i_1=h2i; %第二个控制量
h3i=zeros(3,1);h3i_1=h3i; %第三个空置量
x1i=zeros(3,1);x2i=x1i;x3i=x2i;x1i_1=x1i;x2i_1=x2i;x3i_1=x3i; %隐含层输出
%权值初始化
k0=0.03;
%值限定
ynmax=1;ynmin=-1; %系统输出值限定
xpmax=1;xpmin=-1; %P节点输出限定
qimax=1;qimin=-1; %I节点输出限定
qdmax=1;qdmin=-1; %D节点输出限定
uhmax=1;uhmin=-1; %输出结果限定
for k=1:1:6000
k
%系统输出
y1(k) = (0.4*y_1(1)+u_1(1)/(1+u_1(1)^2)+0.2*u_1(1)^3+0.5*u_1(2))+0.3*y_1(2);
y2(k) = (0.4*y_1(2)+u_1(2)/(1+u_1(2)^2)+0.2*u_1(2)^3+0.5*u_1(1))+0.3*y_1(1);
y3(k) = 0;
%控制目标
if selt == 1%加扰测试
r1(k) = CR + 0.005*sin(2*pi*k/200);
r2(k) = h + 0.015*sin(2*pi*k/200);
r3(k) = 0;
r1s(k) = CR;
r2s(k) = h;
r3s(k) = 0;
else %跟踪测试
r1(k) = sign(0.001*sin(2*pi*k/2000));
r2(k) = sign(0.003*sin(2*pi*k/2000));
r3(k) = 0;
r1s(k) = CR;
r2s(k) = h;
r3s(k) = 0;
end
%系统输出限制
yn=[y1(k),y2(k),y3(k)];
yn(find(yn>ynmax))=ynmax;
yn(find(yn<ynmin))=ynmin
%输入层输出
x1o=[r1(k);yn(1)];
x2o=[r2(k);yn(2)];
x3o=[r3(k);yn(3)];
%隐含层
x1i=w11*x1o;
x2i=w12*x2o;
x3i=w13*x3o;
%比例神经元P计算
xp=[x1i(1),x2i(1),x3i(1)];
xp(find(xp>xpmax))=xpmax;
xp(find(xp<xpmin))=xpmin;
qp=xp;
h1i(1)=qp(1);
h2i(1)=qp(2);
h3i(1)=qp(3);
%积分神经元I计算
xi=[x1i(2),x2i(2),x3i(2)];
qi=[0,0,0];
qi_1=[h1i(2),h2i(2),h3i(2)];
qi=qi_1+xi;
qi(find(qi>qimax))=qimax;
qi(find(qi<qimin))=qimin;
h1i(2)=qi(1);
h2i(2)=qi(2);
h3i(2)=qi(3);
%微分神经元D计算
xd=[x1i(3),x2i(3),x3i(3)];
qd=[0 0 0];
xd_1=[x1i_1(3),x2i_1(3),x3i_1(3)];
qd=xd-xd_1;
qd(find(qd>qdmax))=qdmax;
qd(find(qd<qdmin))=qdmin;
h1i(3)=qd(1);
h2i(3)=qd(2);
h3i(3)=qd(3);
%输出层计算
wo=[w21;w22;w23];
qo=[h1i',h2i',h3i'];
qo=qo';
uh=wo*qo;
uh(find(uh>uhmax))=uhmax;
uh(find(uh<uhmin))=uhmin;
u1(k)=uh(1);
u2(k)=uh(2);
u3(k)=uh(3);
%计算误差
error=[r1(k)-y1(k);r2(k)-y2(k);0];
error1(k)=error(1);error2(k)=error(2);error3(k)=0;
J(k)=0.5*(error(1)^2+error(2)^2); %调整大小
ypc=[y1(k)-y_1(1);y2(k)-y_1(2);y3(k)-y_1(3)];
uhc=[u_1(1)-u_2(1);u_1(2)-u_2(2);u_1(3)-u_2(3)];
%隐含层和输出层权值调整
%调整w21
Sig1=sign(ypc./(uhc(1)+0.00001));
dw21=sum(error.*Sig1)*qo';
w21=w21+rate2*dw21;
%调整w22
Sig2=sign(ypc./(uh(2)+0.00001));
dw22=sum(error.*Sig2)*qo';
w22=w22+rate2*dw22;
%调整w23
Sig3=sign(ypc./(uh(3)+0.00001));
dw23=sum(error.*Sig3)*qo';
w23=w23+rate2*dw23;
%输入层和隐含层权值调整
delta2=zeros(3,3);
wshi=[w21;w22;w23];
for t=1:1:3
delta2(1:3,t)=error(1:3).*sign(ypc(1:3)./(uhc(t)+0.00000001));
end
for j=1:1:3
sgn(j)=sign((h1i(j)-h1i_1(j))/(x1i(j)-x1i_1(j)+0.00001));
end
s1=sgn'*[r1(k),y1(k)];
wshi2_1=wshi(1:3,1:3);
alter=zeros(3,1);
dws1=zeros(3,2);
for j=1:1:3
for p=1:1:3
alter(j)=alter(j)+delta2(p,:)*wshi2_1(:,j);
end
end
for p=1:1:3
dws1(p,:)=alter(p)*s1(p,:);
end
w11=w11+rate1*dws1;
%调整w12
for j=1:1:3
sgn(j)=sign((h2i(j)-h2i_1(j))/(x2i(j)-x2i_1(j)+0.0000001));
end
s2=sgn'*[r2(k),y2(k)];
wshi2_2=wshi(:,4:6);
alter2=zeros(3,1);
dws2=zeros(3,2);
for j=1:1:3
for p=1:1:3
alter2(j)=alter2(j)+delta2(p,:)*wshi2_2(:,j);
end
end
for p=1:1:3
dws2(p,:)=alter2(p)*s2(p,:);
end
w12=w12+rate1*dws2;
%调整w13
for j=1:1:3
sgn(j)=sign((h3i(j)-h3i_1(j))/(x3i(j)-x3i_1(j)+0.0000001));
end
s3=sgn'*[r3(k),y3(k)];
wshi2_3=wshi(:,7:9);
alter3=zeros(3,1);
dws3=zeros(3,2);
for j=1:1:3
for p=1:1:3
alter3(j)=(alter3(j)+delta2(p,:)*wshi2_3(:,j));
end
end
for p=1:1:3
dws3(p,:)=alter2(p)*s3(p,:);
end
w13=w13+rate1*dws3;
%参数更新
u_3=u_2;u_2=u_1;u_1=uh;
y_2=y_1;y_1=yn;
h1i_1=h1i;h2i_1=h2i;h3i_1=h3i;
x1i_1=x1i;x2i_1=x2i;x3i_1=x3i;
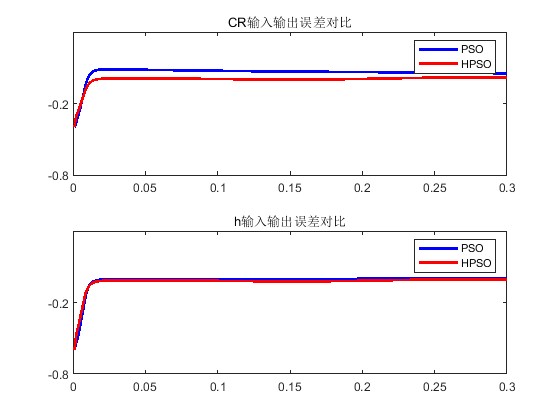
ErrCr(k) = y1(k) - r1s(k);
Errh(k) = y2(k) - r2s(k);
end
05_005_m

































