



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZJeUlpdu
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
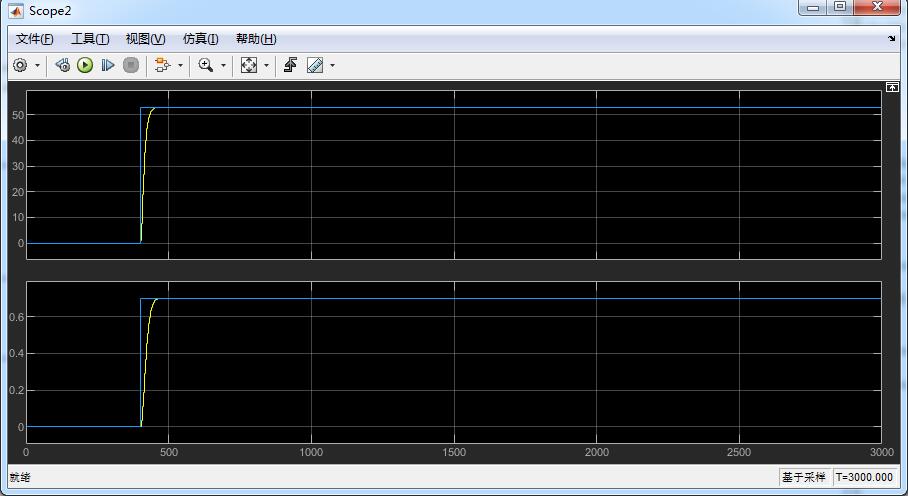
2.部分仿真图预览
3.算法概述
预测模型是模型预测控制的基础,它能够通过控制系统中被控平台提供的当前系统状态信息,再加上未来的控制输入变量,预测到未来的被控平台的状态。预测模型的形式没有确定的形式要求,可以是状态空间方程、传递函数也可以是阶跃响应模型、脉冲响应模型模糊模型等。根据被控对象和需要预测的状态选择合适的预测模型。
4.部分源码
function [sys,x0,str,ts] = mpc_prediction_controller(t,...
z,...
y,...
flag,...
A_state,...
B_state,...
C_state,...
D_state,...
P,...
M,...
Q,...
R)
%以下是S函数标志流程和格式
persistent MPC_pred Lens
switch flag
case 0
%mpc预测控制器初始化设置
[Rb,Rc] = size(B_state);
Lens = size(C_state,1);
%MPC优化控制器主函数
MPC_pred = mpc_pcontroller(A_state,...
B_state,...
C_state,...
D_state,...
P,...
M,...
Q,...
R);
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = Rc;
sizes.NumInputs = 2*Lens;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
str = [];
x0 = [];
ts = [1 0];
case 2
sys = [];
case 3
din = y(1:Lens);
Ref = y(Lens+1:2*Lens);
sys = MPC_pred(din,Ref);
case 9
sys = [];
otherwise
end
end
08_046_m

































