



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZJWbkpZv
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
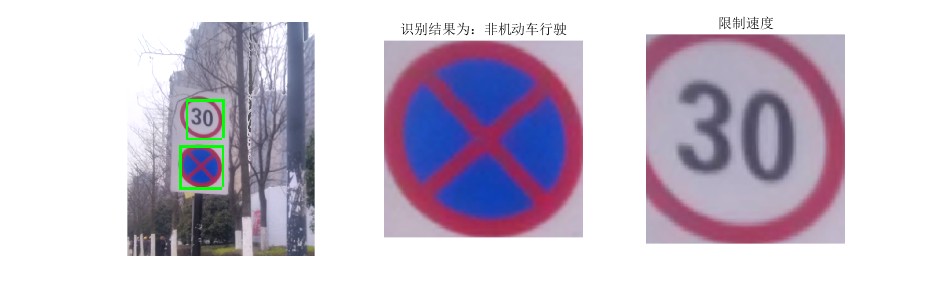
2.部分仿真图预览
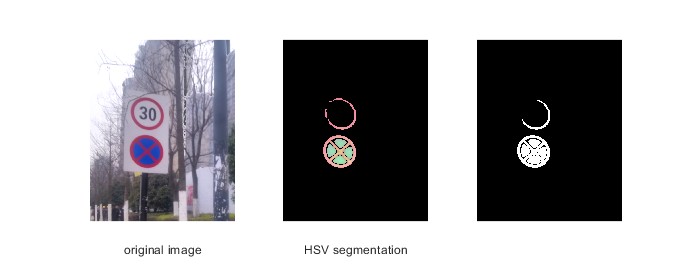

3.算法概述
广义回归神经网络是径向基神经网络的一种,GRNN具有很强的非线性映射能力和学习速度,比RBF具有更强的优势,网络最后普收敛于样本量集聚较多的优化回归,样本数据少时,预测效果很好,还可以处理不稳定数据。虽然GRNN看起来没有径向基精准,但实际在分类和拟合上,特别是数据精准度比较差的时候有着很大的优势。
4.部分源码
...................................................................................
if isempty(X4) == 0 & isempty(X5) == 1 & isempty(X6) == 1;
ftest = func_feature2(X4);
yout = round(net2(ftest'));
figure;
subplot(121);
imshow(X3);
subplot(122);
imshow(X4);
if yout == 1
title('识别结果为:非机动车行驶');
end
if yout == 2
title('减速让车');
end
if yout == 3
title('禁止鸣笛');
end
if yout == 4
title('禁止左转');
end
if yout == 5
title('慢');
end
if yout == 6
title('人行通道');
end
if yout == 7
title('限制速度');
end
if yout == 8
title('右转');
end
if yout == 9
title('注意行人');
end
end
if isempty(X4) == 0 & isempty(X5) == 0 & isempty(X6) == 1;
ftest = func_feature2(X4);
yout1 = round(net2(ftest'));
ftest = func_feature2(X5);
yout2 = round(net2(ftest'));
figure;
subplot(131);
imshow(X3);
subplot(132);
imshow(X4);
if yout1 == 1
title('识别结果为:非机动车行驶');
end
if yout1 == 2
title('减速让车');
end
if yout1 == 3
title('禁止鸣笛');
end
if yout1 == 4
title('禁止左转');
end
if yout1 == 5
title('慢');
end
if yout1 == 6
title('人行通道');
end
if yout1 == 7
title('限制速度');
end
if yout1 == 8
title('右转');
end
if yout1 == 9
title('注意行人');
end
subplot(133);
imshow(X5);
if yout2 == 1
title('识别结果为:非机动车行驶');
end
if yout2 == 2
title('减速让车');
end
if yout2 == 3
title('禁止鸣笛');
end
if yout2 == 4
title('禁止左转');
end
if yout2 == 5
title('慢');
end
if yout2 == 6
title('人行通道');
end
if yout2 == 7
title('限制速度');
end
if yout2 == 8
title('右转');
end
if yout2 == 9
title('注意行人');
end
end
if isempty(X4) == 0 & isempty(X5) == 0 & isempty(X6) == 0;
ftest = func_feature2(X4);
yout1 = round(net2(ftest'));
ftest = func_feature2(X5);
yout2 = round(net2(ftest'));
ftest = func_feature2(X6);
yout3 = round(net2(ftest'));
figure;
subplot(221);
imshow(X3);
subplot(222);
imshow(X4);
if yout1 == 1
title('识别结果为:非机动车行驶');
end
if yout1 == 2
title('减速让车');
end
if yout1 == 3
title('禁止鸣笛');
end
if yout1 == 4
title('禁止左转');
end
if yout1 == 5
title('慢');
end
if yout1 == 6
title('人行通道');
end
if yout1 == 7
title('限制速度');
end
if yout1 == 8
title('右转');
end
if yout1 == 9
title('注意行人');
end
subplot(223);
imshow(X5);
if yout2 == 1
title('识别结果为:非机动车行驶');
end
if yout2 == 2
title('减速让车');
end
if yout2 == 3
title('禁止鸣笛');
end
if yout2 == 4
title('禁止左转');
end
if yout2 == 5
title('慢');
end
if yout2 == 6
title('人行通道');
end
if yout2 == 7
title('限制速度');
end
if yout2 == 8
title('右转');
end
if yout2 == 9
title('注意行人');
end
subplot(224);
imshow(X6);
if yout3 == 1
title('识别结果为:非机动车行驶');
end
if yout3 == 2
title('减速让车');
end
if yout3 == 3
title('禁止鸣笛');
end
if yout3 == 4
title('禁止左转');
end
if yout3 == 5
title('慢');
end
if yout3 == 6
title('人行通道');
end
if yout3 == 7
title('限制速度');
end
if yout3 == 8
title('右转');
end
if yout3 == 9
title('注意行人');
end
end
10_037_m

































