



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y56Zmpxv
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
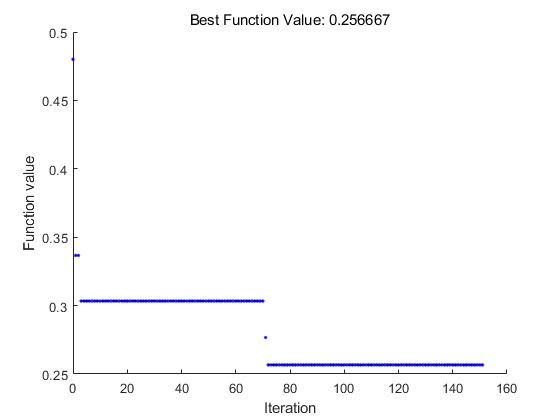
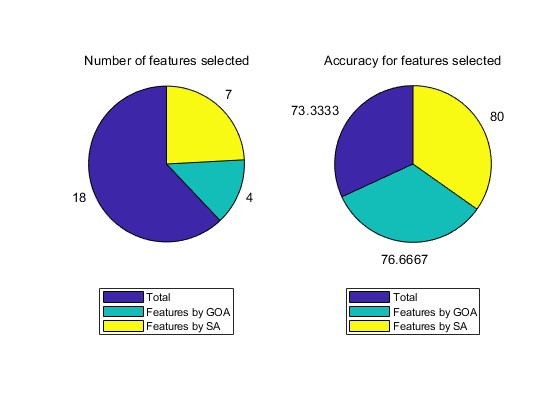
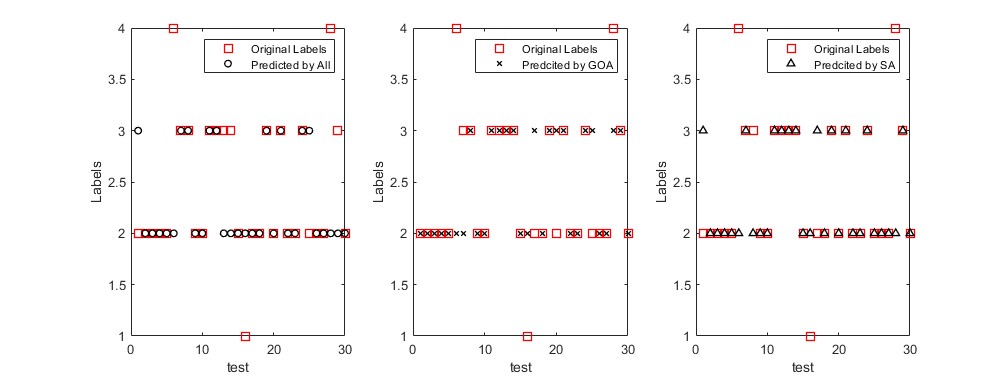
2.部分仿真图预览
3.算法概述
蝗 虫 优 化 算 法 ( Grasshopper Optimization Algorithm, GOA) 是一种新型的元启发式算法,由 Mirjalili 等人于2017年提出。该算法受幼虫和成年蝗虫大范围移动与寻找食物源的聚集行为启发,具有操作参数少,公式简单的特点。针对基准测试函数优化问题的实验结果表明,GOA的收敛性优于粒子群算法。
4.部分源码
.......................................................................
GrassHopperPositions=round(initialization(N,dim,ub,lb));
GrassHopperFitness = zeros(1,N);
fitness_history=zeros(N,Max_iter);
position_history=zeros(N,Max_iter,dim);
Convergence_curve=zeros(1,Max_iter);
Trajectories=zeros(N,Max_iter);
cMax=2.079;
cMin=0.00004;
........................................................................
[sorted_fitness,sorted_indexes]=sort(GrassHopperFitness);
for newindex=1:N
Sorted_grasshopper(newindex,:)=GrassHopperPositions(sorted_indexes(newindex),:);
end
TargetPosition=Sorted_grasshopper(1,:);
TargetFitness=sorted_fitness(1);
l=2;
while l<Max_iter+1
c=cMax-l*((cMax-cMin)/Max_iter);
for i=1:size(GrassHopperPositions,1)
temp= GrassHopperPositions';
for k=1:2:dim
S_i=zeros(2,1);
for j=1:N
if i~=j
Dist=distance(temp(k:k+1,j), temp(k:k+1,i));
r_ij_vec=(temp(k:k+1,j)-temp(k:k+1,i))/(Dist+eps);
xj_xi=2+rem(Dist,2);
s_ij=((ub(k:k+1) - lb(k:k+1))*c/2)*S_func(xj_xi).*r_ij_vec;
S_i=S_i+s_ij;
end
end
S_i_total(k:k+1, :) = S_i;
end
...........................................................................
fitness_history(i,l)=GrassHopperFitness(1,i);
position_history(i,l,:)=GrassHopperPositions(i,:);
Trajectories(:,l)=GrassHopperPositions(:,1);
if GrassHopperFitness(1,i)<TargetFitness
TargetPosition=GrassHopperPositions(i,:);
TargetFitness=GrassHopperFitness(1,i);
end
end
Convergence_curve(l)=TargetFitness;
disp(['In GOA iteration #', num2str(l), ' , target''s objective = ', num2str(TargetFitness)])
l = l + 1;
end
if (flag==1)
TargetPosition = TargetPosition(1:dim-1);
end
A318

































