



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y56bmJdw
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
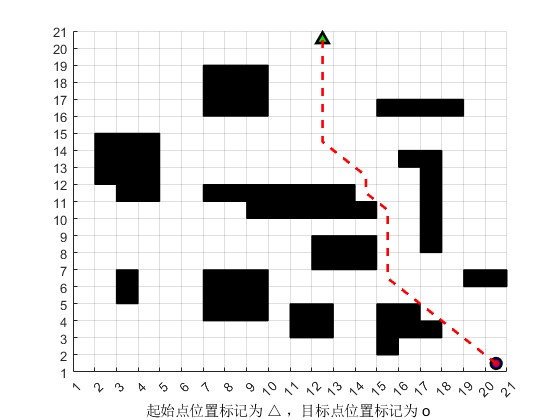
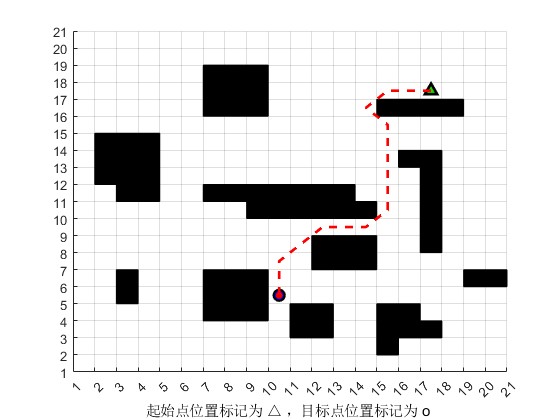
2.部分仿真图预览
3.算法概述
Astar算法是一种图形搜索算法,常用于寻路。它是个以广度优先搜索为基础,集Dijkstra算法与最佳优先(best fit)算法特点于一身的一种 算法。它通过下面这个函数来计算每个节点的优先级,然后选择优先级最高的节点作为下一个待遍历的节点。
AStar(又称 A*),它结合了 Dijkstra 算法的节点信息(倾向于距离起点较近的节点)和贪心算法的最好优先搜索算法信息(倾向于距离目标较近的节点)。可以像 Dijkstra 算法一样保证找到最短路径,同时也像贪心最好优先搜索算法一样使用启发值对算法进行引导。简单点说,AStar的核心在于将游戏背景分为一个又一个格子,每个格子有自己的靠谱值,然后通过遍历起点的格子去找到周围靠谱的格子,接着继续遍历周围…… 最终找到终点。
4.部分源码
....................................................................................
% 开始算法
while((xNode ~= xTarget || yNode ~= yTarget) && NoPath == 1) %%% 判断当前点是否等于目标点
exp_array=expand_array(xNode,yNode,path_cost,xTarget,yTarget,CLOSED,MAX_X,MAX_Y); %%% 不在关闭列表的子节点,(x,y,gn,hn,fn),列数是个数
exp_count=size(exp_array,1); %%% 可选择的子节点个数
for i=1:exp_count %%% 把exp_array内的元素添加到 开启列表 里面
flag=0; %%% 将exp_array内的点的标志位设为0
for j=1:OPEN_COUNT %%% OPEN_COUNT 从1开始,自加
if(exp_array(i,1) == OPEN(j,2) && exp_array(i,2) == OPEN(j,3) ) %%%判断可选子节点是否与OPEN[]中的点相同
OPEN(j,8)=min(OPEN(j,8),exp_array(i,5)); %%%如果相同,比较两个fn的值的大小,并将fn小的坐标点赋值给OPEN(j,8)
......................................................................................
else
NoPath=0;
end
end
i=size(CLOSED,1); %%%CLOSE里面的长度
Optimal_path=[]; %%%路径数组
xval=CLOSED(i,1); %%%把CLOSE最后一组数提出来,最后一组数为目标点
yval=CLOSED(i,2);
i=1;
Optimal_path(i,1)=xval; %%%把目标点的坐标赋给 路径数组的 第一组
Optimal_path(i,2)=yval;
i=i+1;
if ( (xval == xTarget) && (yval == yTarget)) %%%检测CLOSE最后一组是否为目标点
inode=0;
%Traverse OPEN and determine the parent nodes 遍历OPEN并确定父节点
parent_x=OPEN(node_index(OPEN,xval,yval),4); %node_index returns the index of the node node_index返回节点的索引
parent_y=OPEN(node_index(OPEN,xval,yval),5);%%% 将当前点的父节点提出来
while( parent_x ~= xStart || parent_y ~= yStart) %%% 判断父节点是否为起始点
Optimal_path(i,1) = parent_x; %%% 不是 则将父节点送给路径数组
Optimal_path(i,2) = parent_y;
%Get the grandparents:-)
inode=node_index(OPEN,parent_x,parent_y);
parent_x=OPEN(inode,4);%node_index returns the index of the node
parent_y=OPEN(inode,5);
i=i+1;
end;
toc
j = size(Optimal_path,1) + 1;
Optimal_path(j,1) = xStart;
Optimal_path(j,2) = yStart; %%%把起始点加进去
p=plot(Optimal_path(j,1)+.5,Optimal_path(j,2)+.5,'bo'); %%
j=j-1;
for i=j:-1:1
pause(.25);
set(p,'XData',Optimal_path(i,1)+.5,'YData',Optimal_path(i,2)+.5);
drawnow ;
end;
........................................................................
A341

































