



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZJaWlJZu
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
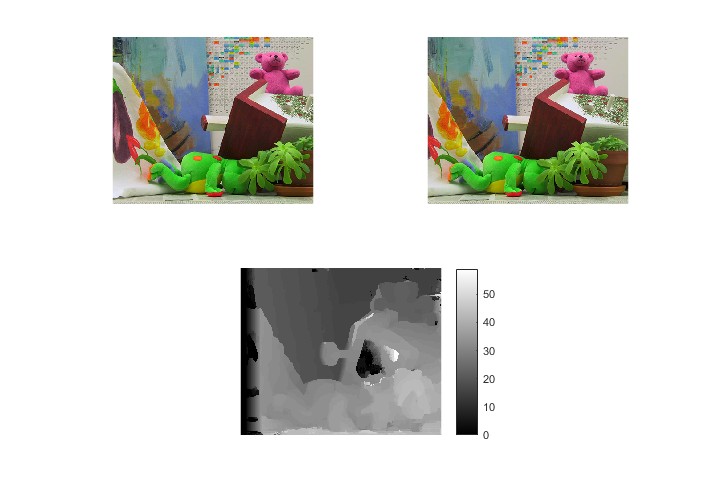
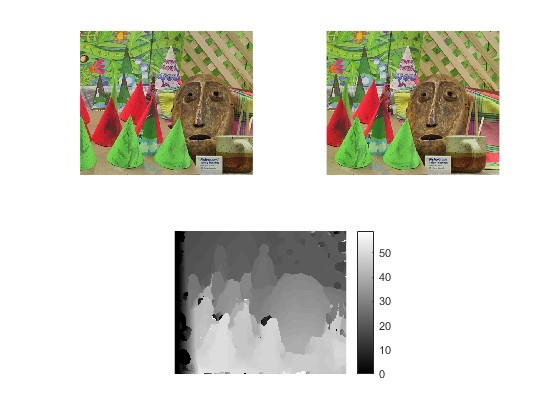
2.部分仿真图预览
3.算法概述
深度学习的蓬勃发展得益于大规模有标注的数据驱动,有监督学习(supervised learning)推动深度模型向着性能越来越高的方向发展。但是,大量的标注数据往往需要付出巨大的人力成本,越来越多的研究开始关注如何在不获取数据标签的条件下提升模型的性能,也就是自监督学习(self-supervised learning)/无监督学习(unsupervised learning)。
对于立体匹配(stereo matching),或者双目深度估计,像LiDAR这样的设备是极其笨重且昂贵的,它所能收集的只是稀疏的深度信息,而我们需要的是密集的深度图(dense depth map);而基于结构光的设备往往只能在室内场景下进行深度信息标注,在室外场景下难以达到较高的标注质量。因此,自监督学习在立体匹配中得到越来越多的关注。本文主要梳理了近年来自监督学习在深度立体匹配中的应用方法,希望和大家一起探讨学习。
4.部分源码
...........................................................................
WS = uint16(windowsize); % Set window size, must be uneven
WS2 = uint16( ( WS - 1 ) / 2 ); % Half window
D = uint16(disparity)+1; % number of disparities
heightL = uint16( size( imgleft, 1 ) ); heightR = uint16( size( imgright, 1 ) );
widthL = uint16( size( imgleft, 2 ) ); widthR = uint16( size( imgright, 2 ) );
if ( heightL ~= heightR || widthL ~= widthR )
error('Height and width of left and right image must be equal');
end
pcost = zeros( heightL, widthL, D, 'uint8' );
wcost = zeros( heightL, widthL, D, 'single' );
dmap = zeros( heightL, widthL, 'uint8' );
dcost = zeros( heightL, widthL, 'single' );
h = zeros(WS,WS,'double'); h(1,1) = 1; h(1,WS) = -1; h(WS,1) = -1; h(WS,WS) = 1;
for Dc = 1 : D
maxL = widthL + 1 - Dc;
pcost(:, Dc : widthL, Dc ) = imabsdiff( imgright( :, 1 : maxL), imgleft( :, Dc : widthL) );
end
icost = single(pcost);
icost = cumsum( cumsum( icost ), 2 );
wcost = imfilter(icost,h,'same','symmetric');
[ dcost(:,D+WS2:widthL), dmap(:,D+WS2:widthL)] = min( wcost(:,D+WS2:widthL,:),[], 3 );
for j=WS2+1:D+WS2
[ dcost(:,j), dmap(:,j)] = min( wcost(:, j, 1 : (j - WS2) ),[], 3 );
end
warning off;
spdmap = single(dmap-1);
if spacc==1
for j=D+1:widthL
for i=1:heightL
if dmap(i,j)>1 && dmap(i,j)<D
p = polyfit2((single(dmap(i,j)-2:dmap(i,j))),shiftdim(single(wcost(i,j,dmap(i,j)-1:dmap(i,j)+1)),1),2);
temp=roots(p);
spdmap(i,j)=real(temp(1));
end
end
end
end
warning on;
A479

































