



核心提示:A_059,包括程序操作录像...
1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y5uck5lt
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
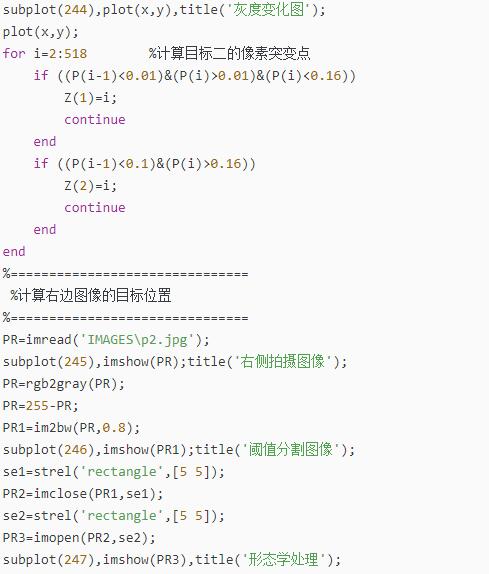
2.部分源码
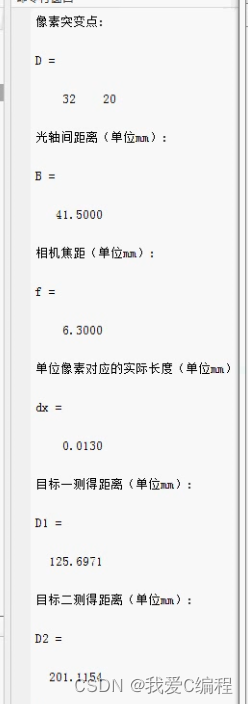
3.部分仿真图预览

4.算法概述
双目相机一般由左眼和右眼两个水平放置的相机组成。当然也可以做成上下两个目,但我们见到的主流双目都是做成左右的。在左右双目的相机中,我们可以把两个相机都看作针孔相机。它们是水平放置的,意味两个相机的光圈中心都位于x轴上。它们的距离称为双目相机的基线(Baseline,记作b),是双目的重要参数。双目相机一般由左眼和右眼两个水平放置的相机组成。当然也可以做成上下两个目,但我们见到的主流双目都是做成左右的。在左右双目的相机中,我们可以把两个相机都看作针孔相机。它们是水平放置的,意味两个相机的光圈中心都位于x轴上。它们的距离称为双目相机的基线(Baseline,记作b),是双目的重要参数。

































