



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y5uTmJ9q
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
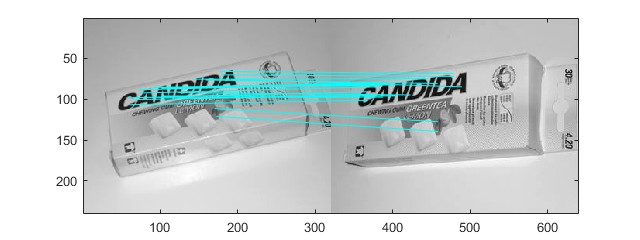
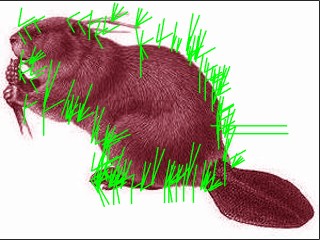
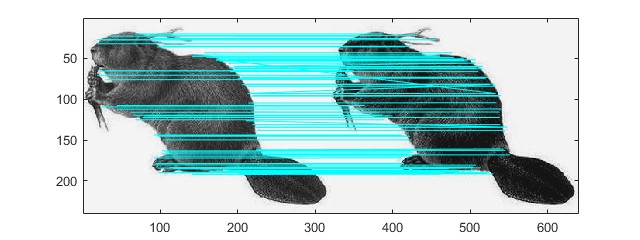
2.部分仿真图预览
3.算法概述
SIFT 是一种从图像中提取独特不变特征的方法,其特点为基于图像的一些局部特征,而与图像整体的大小和旋转无关。并且该方法对于光照、噪声、仿射变换具有一定鲁棒性,同时能生成大量的特征点。SIFT (Scale-invariant feature transform), 尺度不变特征转换,是一种图像局部特征提取算法,它通过在不同的尺度空间中寻找极值点(特征点,关键点)的精确定位和主方向,构建关键点描述符来提取特征。
SIFT提取的关键点具有尺度不变性、旋转不变性,而且不会因光照、仿射变换和噪音等因素而干扰。SIFT所查找到的关键点是一些十分突出、不会因光照、仿射变换和噪音等因素而变化的点,如角点、边缘点、暗区的亮点及亮区的暗点等。
1. SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性;
2. 独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配;
3. 多量性,即使少数的几个物体也可以产生大量的SIFT特征向量;
4. 高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;
5. 可扩展性,可以很方便的与其他形式的特征向量进行联合。
4.部分源码
....................................
frames = [] ;
descriptors = [] ;
%
% 开始工作
%
fprintf('---------------------------- 开始 SIFT: 从图像中提取SIFT特征 ------------------------------\n') ; tic ;
fprintf('SIFT: 用DoG构造尺度空间 ...\n') ; tic ;
scalespace = do_gaussian(I,sigmaN,O,S,omin,-1,S+1,sigma0) ;
fprintf(' 高斯尺度空间计时: (%.3f s)\n',toc) ; tic ;
difofg = do_diffofg(scalespace) ;
fprintf(' 构建相减尺度空间: (%.3f s)\n',toc) ;
for o=1:scalespace.O
fprintf('CS5240 -- SIFT: 计算 “组” %d\n', o-1+omin) ;
tic ;
% DOG octave 的局部极值检测
oframes1 = do_localmax( difofg.octave{o}, 0.8*thresh, difofg.smin ) ;
oframes2 = do_localmax( -difofg.octave{o}, 0.8*thresh, difofg.smin ) ;
oframes = [oframes1 ,oframes2 ] ;
fprintf('CS5240 -- SIFT: 初始化关键点 # %d. \n', ...
size(oframes, 2)) ;
fprintf(' 用时 (%.3f s)\n', ...
toc) ;
tic ;
if size(oframes, 2) == 0
continue;
end
% 移除靠近边界的关键点
rad = magnif * scalespace.sigma0 * 2.^(oframes(3,:)/scalespace.S) * NBP / 2 ;
sel=find(...
oframes(1,:)-rad >= 1 & ...
oframes(1,:)+rad <= size(scalespace.octave{o},2) & ...
oframes(2,:)-rad >= 1 & ...
oframes(2,:)+rad <= size(scalespace.octave{o},1) ) ;
oframes=oframes(:,sel) ;%把不是靠近边界点的极值点重新放入oframes中
fprintf('CS5240 -- SIFT: 移除靠近边界关键点后 # %d \n', size(oframes,2)) ;
tic ;
% 精简局部, 阈值强度 和移除边缘关键点
oframes = do_extrefine(...
oframes, ...
difofg.octave{o}, ...
difofg.smin, ...
thresh, ...
r) ;
fprintf('CS5240 -- SIFT: 移除低对比度和边缘上关键点后 # %d \n',size(oframes,2)) ;
fprintf(' Time (%.3f s)\n', toc) ;
tic ;
fprintf('CS5240 -- SIFT: 计算特征点方向\n');
% 计算方向
oframes = do_orientation(...
oframes, ...
scalespace.octave{o}, ...
scalespace.S, ...
scalespace.smin, ...
scalespace.sigma0 ) ;
fprintf(' 用时: (%.3f s)\n', toc);tic;
% Store frames
x = 2^(o-1+scalespace.omin) * oframes(1,:) ;
y = 2^(o-1+scalespace.omin) * oframes(2,:) ;
sigma = 2^(o-1+scalespace.omin) * scalespace.sigma0 * 2.^(oframes(3,:)/scalespace.S) ; %图像的尺度
frames = [frames, [x(:)' ; y(:)' ; sigma(:)' ; oframes(4,:)] ] ;
fprintf('CS5240 -- SIFT:计算方向后的特征点 # %d \n', size(frames,2)) ;
% Descriptors
fprintf('CS5240 -- SIFT: 计算 描述子...\n') ;
tic ;
........................................
A154

































