



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/Y56cmZdr
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
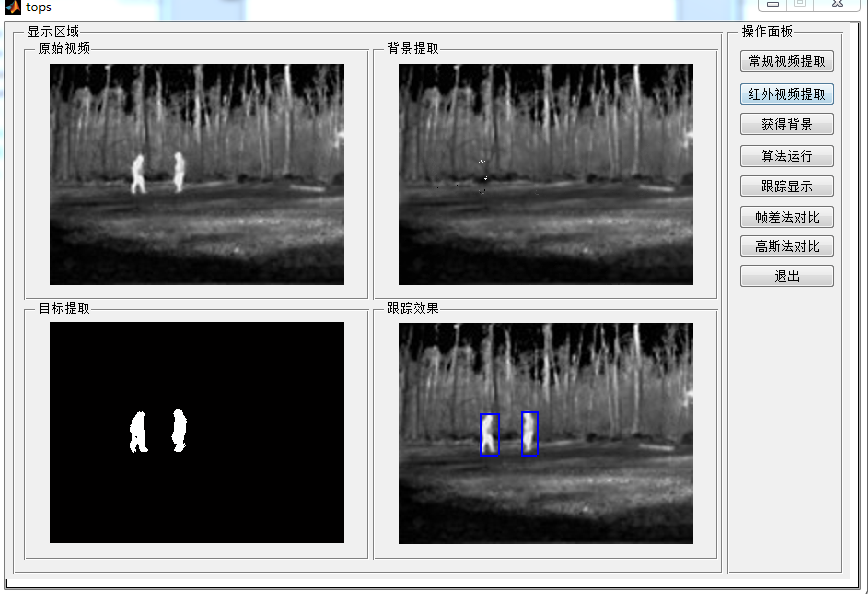
2.部分仿真图预览

3.算法概述
混合高斯模型使用K(基本为3到5个) 个高斯模型来表征图像中各个像素点的特征,在新一帧图像获得后更新混合高斯模型,用当前图像中的每个像素点与混合高斯模型匹配,如果成功则判定该点为背景点, 否则为前景点。通观整个高斯模型,他主要是有方差和均值两个参数决定,,对均值和方差的学习,采取不同的学习机制,将直接影响到模型的稳定性、精确性和收敛性。由于我们是对运动目标的背景提取建模,因此需要对高斯模型中方差和均值两个参数实时更新。为提高模型的学习能力,改进方法对均值和方差的更新采用不同的学习率;为提高在繁忙的场景下,大而慢的运动目标的检测效果,引入权值均值的概念,建立背景图像并实时更新,然后结合权值、权值均值和背景图像对像素点进行前景和背景的分类。
4.部分源码
Time1 = 0;
tic;
for tt = 1:round(frameNum_Original)
disp('当前帧数');
tt
image = Temp(:,:,tt);
for kk = 1:K
Datac = double(Temp(:,:,tt))-reshape(Mus(:,kk,:),D,CRGB);
Squared(:,kk) = sum((Datac.^ 2)./reshape(Sigmas(:,kk,:),D,CRGB),2);
end
[junk,index] = min(Squared,[],2);
Gaussian = zeros(size(Squared));
Gaussian(sub2ind(size(Squared),1:length(index),index')) = ones(D,1);
Gaussian = Gaussian&(Squared<Deviation_sq);
%参数更新
Weights = (1-Alpha).*Weights+Alpha.*Gaussian;
for kk = 1:K
pixel_matched = repmat(Gaussian(:,kk),1,CRGB);
pixel_unmatched = abs(pixel_matched-1);
Mu_kk = reshape(Mus(:,kk,:),D,CRGB);
Sigma_kk = reshape(Sigmas(:,kk,:),D,CRGB);
Mus(:,kk,:) = pixel_unmatched.*Mu_kk+pixel_matched.*(((1-Rho).*Mu_kk)+(Rho.*double(image)));
Mu_kk = reshape(Mus(:,kk,:),D,CRGB);
Sigmas(:,kk,:) = pixel_unmatched.*Sigma_kk+pixel_matched.*(((1-Rho).*Sigma_kk)+repmat((Rho.* sum((double(image)-Mu_kk).^2,2)),1,CRGB));
end
replaced_gaussian = zeros(D,K);
mismatched = find(sum(Gaussian,2)==0);
for ii = 1:length(mismatched)
[junk,index] = min(Weights(mismatched(ii),:)./sqrt(Sigmas(mismatched(ii),:,1)));
replaced_gaussian(mismatched(ii),index) = 1;
Mus(mismatched(ii),index,:) = image(mismatched(ii),:);
Sigmas(mismatched(ii),index,:) = ones(1,CRGB)*Variance;
Weights(mismatched(ii),index) = Props;
end
Weights = Weights./repmat(sum(Weights,2),1,K);
active_gaussian = Gaussian+replaced_gaussian;
%背景分割
[junk,index] = sort(Weights./sqrt(Sigmas(:,:,1)),2,'descend');
bg_gauss_good = index(:,1);
linear_index = (index-1)*D+repmat([1:D]',1,K);
weights_ordered = Weights(linear_index);
for kk = 1:K
Weight(:,kk)= sum(weights_ordered(:,1:kk),2);
end
bg_gauss(:,2:K) = Weight(:,1:(K-1)) < Back_Thresh;
bg_gauss(:,1) = 1;
bg_gauss(linear_index) = bg_gauss;
active_background_gaussian = active_gaussian & bg_gauss;
foreground_pixels = abs(sum(active_background_gaussian,2)-1);
foreground_map = reshape(sum(foreground_pixels,2),RR,CC);
Images1(:,:,tt) = foreground_map;
objects_map = zeros(size(foreground_map),'int32');
object_sizes = [];
Obj_pos = [];
new_label = 1;
%计算连通区域
[label_map,num_labels] = bwlabel(foreground_map,8);
for label = 1:num_labels
object = (label_map == label);
object_size = sum(sum(object));
if(object_size >= Comp_Thresh)
objects_map = objects_map + int32(object * new_label);
object_sizes(new_label) = object_size;
[X,Y] = meshgrid(1:CC,1:RR);
object_x = X.*object;
object_y = Y.*object;
Obj_pos(:,new_label) = [sum(sum(object_x)) / object_size;
sum(sum(object_y)) / object_size];
new_label = new_label + 1;
end
end
num_objects = new_label - 1;
%去除阴影
index = sub2ind(size(Mus),reshape(repmat([1:D],CRGB,1),D*CRGB,1),reshape(repmat(bg_gauss_good',CRGB,1),D*CRGB,1),repmat([1:CRGB]',D,1));
background = reshape(Mus(index),CRGB,D);
background = reshape(background',RR,CC,CRGB);
background = uint8(background);
background_Update(:,:,:,tt) = background;
background_hsv = rgb2hsv(background);
image_hsv = rgb2hsv(image_sequence(:,:,:,tt));
for i = 1:RR
for j = 1:CC
if (objects_map(i,j))&&...
(abs(image_hsv(i,j,1)-background_hsv(i,j,1))<SHADOWS(1))&&...
(image_hsv(i,j,2)-background_hsv(i,j,2)<SHADOWS(2))&&...
(SHADOWS(3)<=image_hsv(i,j,3)/background_hsv(i,j,3)<=SHADOWS(4))
Shadows(i,j) = 1;
else
Shadows(i,j) = 0;
end
end
end
Images0(:,:,tt) = objects_map;
objecs_adjust_map = Shadows;
Images2(:,:,tt) = objecs_adjust_map;
Images3(:,:,tt)= Images2(:,:,tt);
end
Time1 = toc/frameNum_Original;
msgbox(['视频每帧耗时:',num2str(Time1),'s']);
axes(handles.axes2)
imshow(uint8(background_Update(:,:,:,end)));
drawnow;
10_022_m

































