



1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZJqblZty
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
2.部分仿真图预览
3.算法概述
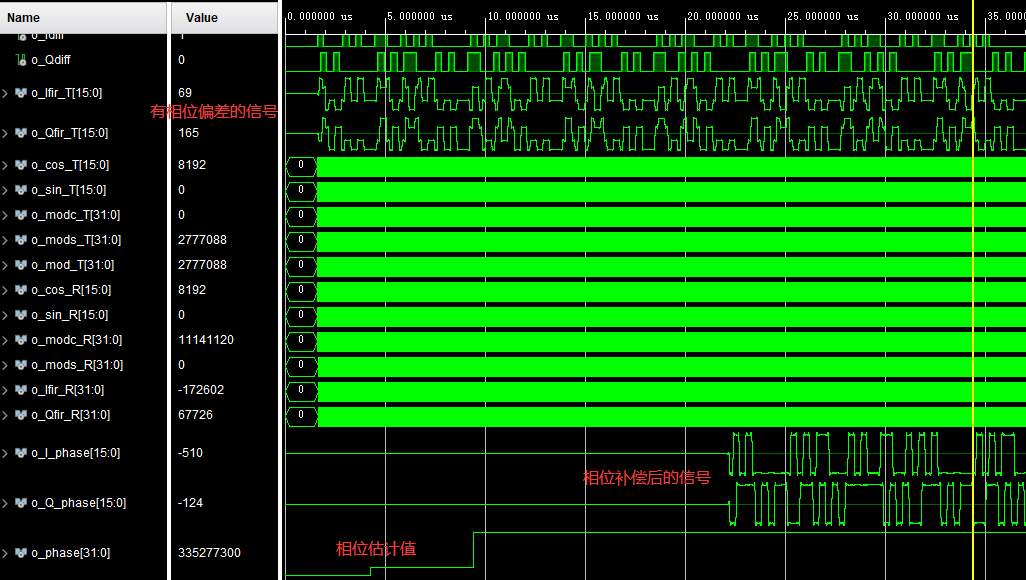
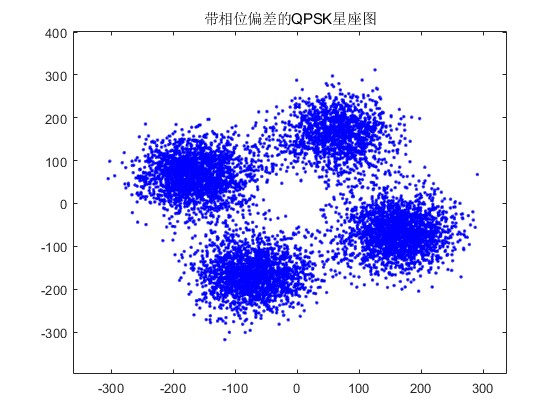
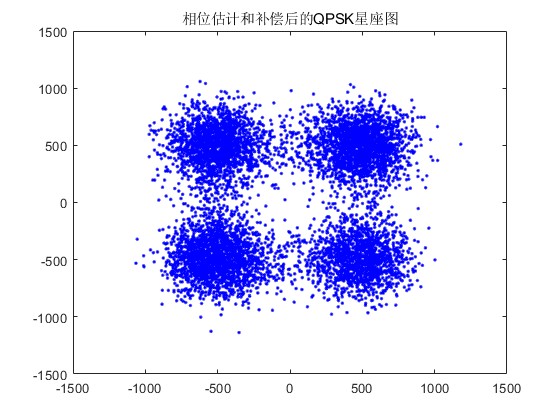
相位偏差是数字通信系统中常见的问题,在QPSK调制通信系统中也同样存在。相位偏差可能导致误码率的增加和系统性能下降。因此,相位偏差的估计和补偿是数字通信系统中一个重要的问题。本文提出了一种基于V&V算法的带相位偏差QPSK调制信号相位估计和补偿方法,提高QPSK调制通信系统的性能。
4.部分源码
.............................................................
//QPSK调制
TQPSK TQPSKU(
.i_clk (i_clk),
.i_rst (i_rst),
.i_clkSYM(i_clkSYM),
.i_dat (i_dat),
.o_Idiff(o_Idiff),
.o_Qdiff(o_Qdiff),
.o_Ifir (o_Ifir_T),
.o_Qfir (o_Qfir_T),
.o_cos (o_cos_T),
.o_sin (o_sin_T),
.o_modc (o_modc_T),
.o_mods (o_mods_T),
.o_mod (o_mod_T)
);
//QPSK相位估计和补偿
RQPSK_phase_est RQPSKU(
.i_clk (i_clk),
.i_rst (i_rst),
.i_clkSYM(i_clkSYM),
.i_med (o_mod_T[25:10]),
.o_cos (o_cos_R),
.o_sin (o_sin_R),
.o_modc (o_modc_R),
.o_mods (o_mods_R),
.o_Ifir (o_Ifir_R),
.o_Qfir (o_Qfir_R),
.o_I_phase(o_I_phase),
.o_Q_phase(o_Q_phase),
.o_phase(o_phase)
);
reg writeen;
initial
begin
writeen = 1'b0;
i_clk = 1'b1;
i_clkSYM=1'b1;
i_rst = 1'b1;
#1600
i_rst = 1'b0;
#100
writeen = 1'b1;
end
always #5 i_clk=~i_clk;
always #80 i_clkSYM=~i_clkSYM;
initial
begin
i_dat = 1'b0;
#1440
repeat(10)
begin
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
end
repeat(10)
begin
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
end
repeat(10)
begin
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
end
$stop();
end
//显示发射端带相位旋转的星座图
integer fout1;
integer fout2;
initial begin
fout1 = $fopen("It.txt","w");
fout2 = $fopen("Qt.txt","w");
end
always @ (posedge i_clk)
begin
if(writeen==1)
begin
$fwrite(fout1,"%d\n",o_Ifir_T);
$fwrite(fout2,"%d\n",o_Qfir_T);
end
end
显示接收端相位估计和补偿之后的星座图
integer fout3;
integer fout4;
initial begin
fout3 = $fopen("IR.txt","w");
fout4 = $fopen("QR.txt","w");
end
always @ (posedge i_clk)
begin
if(writeen==1)
begin
$fwrite(fout3,"%d\n",o_I_phase);
$fwrite(fout4,"%d\n",o_Q_phase);
end
end
endmodule
00_020m

































