



1.������Ŀ�����ͳ����ȡ
>����లȫ����ƽ̨:https://mbd.pub/o/bread/Y5mWlp5x
>�������ʧЧ������ֱ�Ӵ�վ����������ص��̣�
>�������ʧЧ��������Ա���������Ŀ����Ҳ���Լ��Ż���QQ��ϵ��
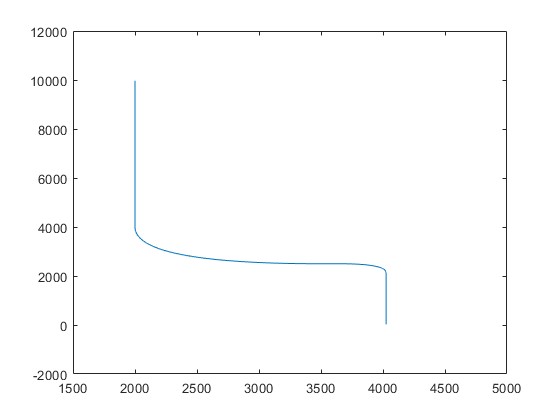
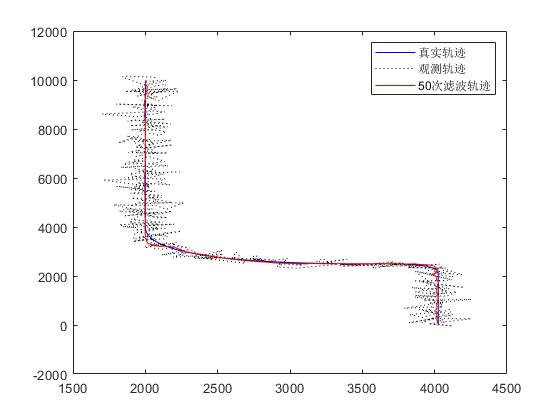
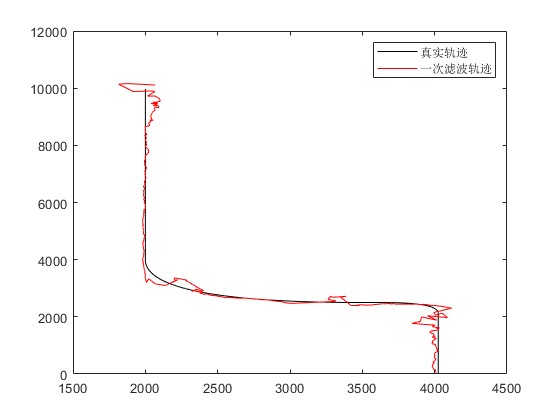
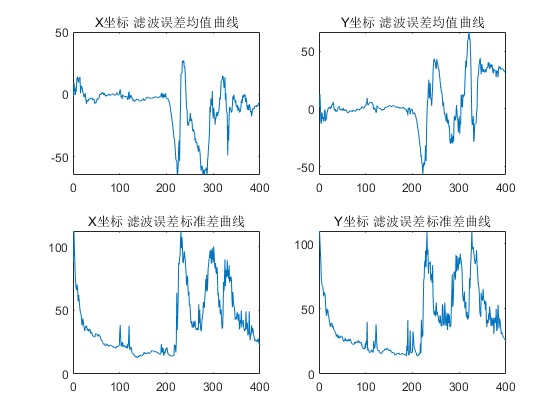
2.���ַ���ͼԤ��
3.�㷨����
IMM�㷨�Ļ���˼�����ö����ͬ���˶�ģ��ƥ�����Ŀ��IJ�ͬ�˶�ģʽ����ͬģ�ͼ��ת�Ƹ����ǨC�������ɷ����Ŀ���״̬���ƺ�ģ���ʵĸ���ʹ�ÿ������˲���
����ʽ��ģ�� IMM��Interacting Multiple Model�������㷨������˼���ǻ��ڱ�Ҷ˹���۶������ģ�ͼ���Զ�ʶ�����л������������ʱ�̣�ͨ�����ö�ӦĿ�����ģ��������ģ���˲���������ʵʱ�Ļ���ģ�ͼ�⣬��ÿһ���˲�������Ȩ��ϵ����ģ���µĸ��ʣ�����Ȩ����ó���ǰ���Ź���״̬���Ӷ��ﵽģ������Ӧ���ٵ�Ŀ�ġ�
����Ŀ��ģ��������Ŀ��״̬����ʱ��仯�Ĺ��̡�һ���õ�ģ�͵ֵ��ϴ��������ݡ���ǰ�������е�Ŀ������㷨���ǻ���ģ�ͽ���״̬���Ƶġ��ڿ������˲���������Ŀ������������״̬�ռ�Ļ���Ŀ�꽨ģ��Ϊ��Ҫ�о�����֮һ��
���㷨���棬�ڻ���Ŀ�����ϵͳ�У����õ��˲��㷨���Կ������˲���Ϊ������ܵĹ����㷨���������˲�����һ�����ԡ���ƫ��������������СΪ������Ź����㷨�����о�ȷ����ѧ��ʽ��������ʹ��Ч�ܡ��������˲�����ʵ������һ�����ݴ��������������õ����˲����������ݻ�ȡ�����������ɵ��Ʒ��̵��Ƹ����µ�״̬���ơ����ڼ������ʹ洢��С���Ƚ���������ʵʱ�����Ҫ���ڹ���ʵ���еõ��㷺Ӧ�á�
������ģ��(Interacting Multiple Model�����IMM)�㷨��������Ӧ���ص㣬�ܹ���Ч�ضԸ���ģ�͵ĸ��ʽ��е��������������ڶԻ���Ŀ��Ķ�λ���١�����ʽ��ģ���㷨�����˶���˲��������Զ�Ӧ����Ӧ��ģ������һ������ʽ��������һ�����ƻ����������ģ��ͨ���������ø���һ��Ŀ��Ļ����˶�����ģ��֮���ת���������ɷ����ת�ƾ���ȷ�������е�Ԫ�� ��ʾĿ���ɵ�i���˶�ģ��ת�Ƶ���j���˶�ģ�͵ĸ��ʡ�
4.����Դ��
%%����2 ��̬ģ��
T=2;
I=diag([1,1,1,1,1,1]);
Phi=[1,T,0,0,(T^2)/2,0;0,1,0,0,T,0;0,0,1,T,0,(T^2)/2;0,0,0,1,0,T;0,0,0,0,1,0;0,0,0,0,0,1];
H=[1,0,0,0,0,0;0,0,1,0,0,0];
G=[(T^2)/2,0;T,0;0,(T^2)/2;0,T;1,0;0,1];
R=[10000,0;0,10000]; % �۲�����������
alpha=0.8; % ��Ȩ˥������
window=1/(1-alpha); % ����������Ч���ڳ���
Xm_estimate(k-1,:)=Xm_est;
if qq==1 %�ɷǻ����������ģ�ͣ������������ ��ʼ��
Xm_predict(k,:)=Xm_pre;
Xm_estimate(k,5)=[z1(1)-Xm_predict(k,1)]*2/(T^2);
Xm_estimate(k,6)=[z1(2)-Xm_predict(k,3)]*2/(T^2);
Xm_estimate(k,1)=z1(1);
Xm_estimate(k,3)=z1(2);
Xm_estimate(k,2)=Xm_estimate(k-1,2)+Xm_estimate(k,5)*T;
Xm_estimate(k,4)=Xm_estimate(k-1,4)+Xm_estimate(k,6)*T;
% ����������
Pm_estimate(1,1)=R(1,1);
Pm_estimate(3,3)=R(2,2);
Pm_estimate(1,2)=R(1,1)*2/T;
Pm_estimate(2,1)=Pm_estimate(1,2);
Pm_estimate(3,4)=R(2,2)*2/T;
Pm_estimate(4,3)=Pm_estimate(3,4);
Pm_estimate(1,5)=R(1,1)*2/(T^2);
Pm_estimate(5,1)=Pm_estimate(1,5);
Pm_estimate(3,6)=R(2,2)*2/(T^2);
Pm_estimate(6,3)=Pm_estimate(3,6);
Pm_estimate(5,5)=[R(1,1)+P(1)+P(2)*2*T+P(3)*T*T]*4/(T^4);
Pm_estimate(6,6)=[R(2,2)+P(4)+P(5)*2*T+P(6)*T*T]*4/(T^4);
Pm_estimate(2,2)=R(1,1)*4/(T^2)+P(1)*4/(T^2)+P(3)+P(2)*4/T;
Pm_estimate(4,4)=R(2,2)*4/(T^2)+P(4)*4/(T^2)+P(6)+P(5)*4/T;
Pm_estimate(2,5)=R(1,1)*4/(T^3)+P(1)*4/(T^3)+P(3)*2/T+P(2)*6/(T^2);
Pm_estimate(5,2)=Pm_estimate(2,5);
Pm_estimate(4,6)=R(2,2)*4/(T^3)+P(4)*4/(T^3)+P(6)*2/T+P(5)*6/(T^2);
Pm_estimate(6,4)=Pm_estimate(4,6);
Xm_est=Xm_estimate(k,:);
qq=0;%������־qq��λ�����ٳ�ʼ������ua1��Ϊ������ʹ������ǻ���ģ��
ua1=10;
m=0;
else
% �˲�����
Xm_predict(k,:)=(Phi*Xm_estimate(k-1,:)')';
Q=[(Xm_estimate(k-1,5)/20)^2,0;0,(Xm_estimate(k-1,6)/20)^2];
Pm_predict=Phi*Pm_estimate*(Phi)'+G*Q*G';
K=Pm_predict*(H)'*inv(H*Pm_predict*(H)'+R);
Xm_estimate(k,:)=(Xm_predict(k,:)'+K*(z1-H*Xm_predict(k,:)'))';
Pm_estimate=(I-K*H)*Pm_predict;
Xm_est=Xm_estimate(k,:);
m=m+1;
delta(k)=[Xm_estimate(k,5),Xm_estimate(k,6)]*[Pm_estimate(5,5),0;0,Pm_estimate(6,6)]*[Xm_estimate(k,5);Xm_estimate(k,6)];
if m>=window
ua(k)=delta(k)+delta(k-1)+delta(k-2)+delta(k-3)+delta(k-4);
ua1=ua(k);
else
ua1=10;
end
end
A105

































