



1.������Ŀ�����ͳ����ȡ
>����లȫ����ƽ̨:https://mbd.pub/o/bread/ZJWYlpxw
>�������ʧЧ������ֱ�Ӵ�վ����������ص��̣�
>�������ʧЧ��������Ա���������Ŀ����Ҳ���Լ��Ż���QQ��ϵ��
2.���ַ���ͼԤ��
3.�㷨����
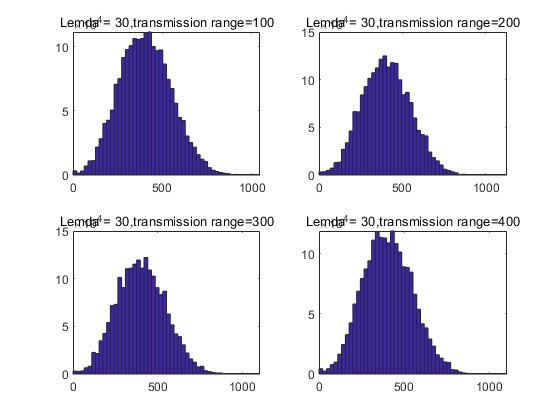
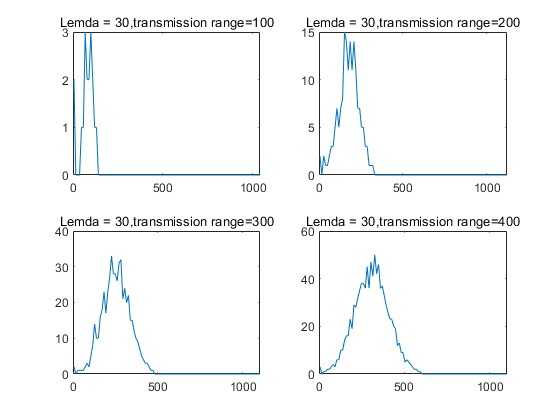
��������֯����(Vehicular Ad-hoc Network VANET)��ͨ�ţ�����˵ ���dz��복֮���ͨ�� �C communications among vehicles��Ϊ��������֯�����һ����������粻һ��, ������Ϊ�ڵ���һֱ���ƶ���, ������Ҫһ���ܺõ�ģ�������泵�ӵ��ƶ�����, ������Ҫ�����е�mobility model�Ͻ����� ��Ƴ�һ����Դ�VANET��mobility model�����泵�ӵ��ƶ�����˵, �����mobility modelֻ��չʾ�����ӵ��ƶ�pattern,����������ͨϵͳ��,���� ���� ��ͨ�źŵ� �ᵼ�³��ӵ��ܶ�(density) ���иı䡣
4.����Դ��
...........................................................................
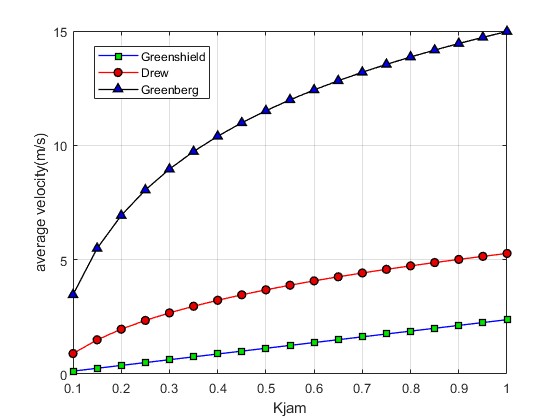
%����Kjam�������Ĺ�ϵ��
q1 = zeros(1,length(Kjam));
q2 = zeros(1,length(Kjam));
q3 = zeros(1,length(Kjam));
for i = 1:length(Kjam)
n = 1;
V0 = c*Kjam(i)^((n+1)/2)/(n+1)/(n+1);
q1(i) = V0*k*(1-(k/Kjam(i))^((n+1)/2));
n =-0.5;
V0 = c*Kjam(i)^((n+1)/2)/(n+1)/(n+1);
q2(i) = V0*k*(1-(k/Kjam(i))^((n+1)/2));
n =-1;
q3(i) = c*k*log(Kjam(i)/k);
end
figure;
plot(Kjam,q1,'b-s',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.0,0.9,0.0]);
hold on;
plot(Kjam,q2,'r-o',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.0,0.0]);
hold on;
plot(Kjam,q3,'k-^',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.0,0.0,0.9]);
hold off;
grid on
xlabel('Kjam');
ylabel('Q');
legend('Greenshield','Drew','Greenberg');
%%
%�����
T = [0:1:7500];%ȫ��Ϊ�̵Ƶ����
V1 = zeros(1,length(T));
V2 = zeros(1,length(T));
Vsafe= zeros(1,length(T));
Videa= zeros(1,length(T));
dsafe= zeros(1,length(T));%����֮��İ�ȫ����
Dxd = zeros(1,length(T));
V01 = 50000/3600;%ǰһ�����ӵij�ʼ�ٶ�
V02 = 50000/3600;%ǰһ�����ӵij�ʼ�ٶ�
a1 = 0;%ǰһ�����Ӽ��ٶ�
a2 = 0.01;%��һ�����Ӽ��ٶ�
Vmax = 80000/3600;%�����������
d1 = 0;
d2 = 0;
............................................................................
figure;
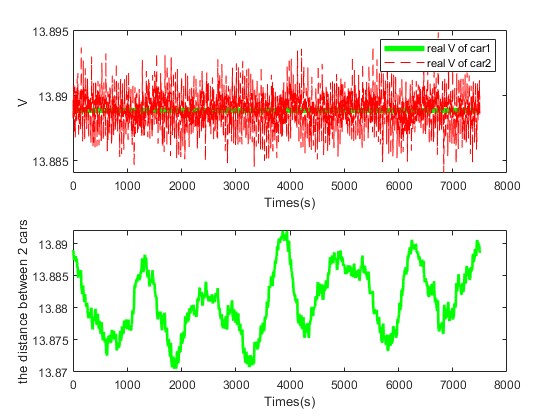
subplot(211);
plot(T,V1,'g','linewidth',4);
hold on
plot(T,V2,'r--');
hold on
xlabel('Times(s)');
ylabel('V');
legend('real V of car1','real V of car2');
subplot(212);
plot(T,Dxd,'g','linewidth',2);
xlabel('Times(s)');
ylabel('the distance between 2 cars');
%���ֺ�ƣ�����
T = [0:0.01:60];%ȫ��Ϊ�̵Ƶ����
V1 = zeros(1,length(T));
V2 = zeros(1,length(T));
Vsafe= zeros(1,length(T));
Videa= zeros(1,length(T));
dsafe= zeros(1,length(T));%����֮��İ�ȫ����
Dxd = zeros(1,length(T));
V01 = 50000/3600;%ǰһ�����ӵij�ʼ�ٶ�
V02 = 50000/3600;%ǰһ�����ӵij�ʼ�ٶ�
a1 = -0.5;%ǰһ�����Ӽ��ٶ�
a2 = -0.47;%��һ�����Ӽ��ٶ�
Vmax = 80000/3600;%�����������
d1 = 0;
d2 = 0;
..............................................................................
figure;
subplot(211);
plot(T,V1,'b','linewidth',2);
hold on
plot(T,V2,'r--');
hold on
xlabel('Times(s)');
ylabel('V');
legend('real V of car1','real V of car2');
subplot(212);
plot(T,Dxd,'b','linewidth',2);
xlabel('Times(s)');
ylabel('the distance between 2 cars');
12_017_m

































