



核心提示:01_047_m,包括程序操作录像...
1.完整项目描述和程序获取
面包多安全交易平台:https://mbd.pub/o/bread/Y5uYmp5r
如果链接失效,程序调试报错或者项目合作可以加微信或者QQ联系。
2.部分源码
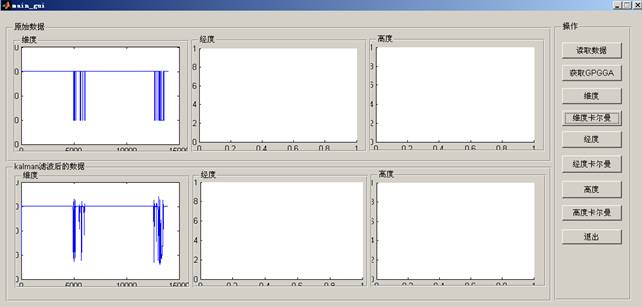
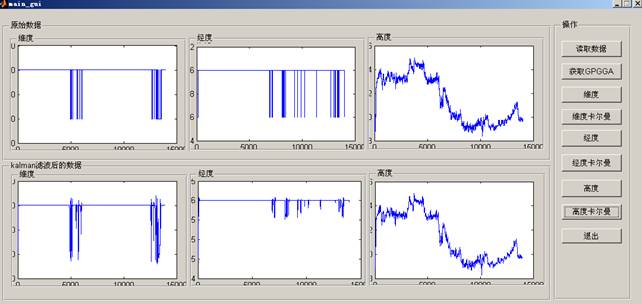
3.部分仿真图预览

4.算法概述
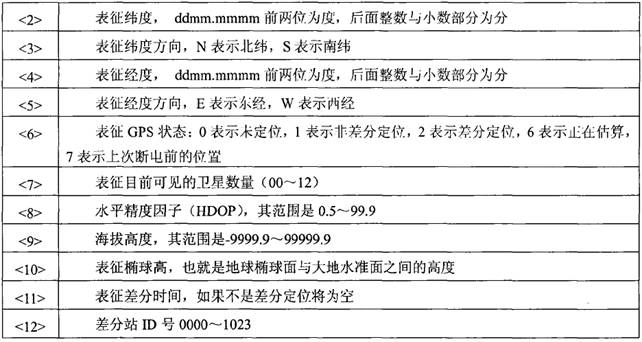
GPGGA是GPS数据输出格式语句,意思是一帧GPS定位的主要数据,是NMEA格式中使用最广的数据之一。该语句包括17个字段。
$GPGGA 语句包括17个字段:语句标识头,世界时间,纬度,纬度半球,经度,经度半球,定位质量指示,使用卫星数量,HDOP-水平精度因子,椭球高,高度单位,大地水准面高度异常差值,高度单位,差分GPS数据期限,差分参考基站标号,校验和结束标记(用回车符<CR>和换行符<LF>),分别用14个逗号进行分隔。
Kalman滤波是在时域上运用状态空间,递推得到的一种滤波算法,便于在计算机上实时实现,计算量和存储量小。该方法可处理多变量非平稳随机过程滤波问题,可处理时变系统滤波问题。例如飞机在飞行过程中,遇到的干扰通常是时变非平稳的噪声,此时运用卡尔曼滤波可有效去除干扰,得到较真实的状态估计数据。
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。kalman是跟踪算法的“hello world”,在当前深度学习跟踪算法遍地的情况下,kalman跟踪效果确实差强人意。但是在实际产品落地时,特别硬件不是很强大、场景不复杂的情况下,kalman还是性价比最高的。

































