



核心提示:01_036_m,操作录像,详细说明文档...
1.完整项目描述和程序获取
面包多安全交易平台:https://mbd.pub/o/bread/Y5uXlphy
如果链接失效,程序调试报错或者项目合作可以加微信或者QQ联系。
2.部分源码
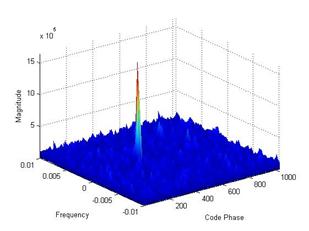
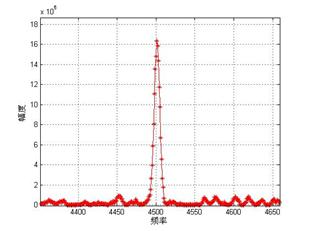
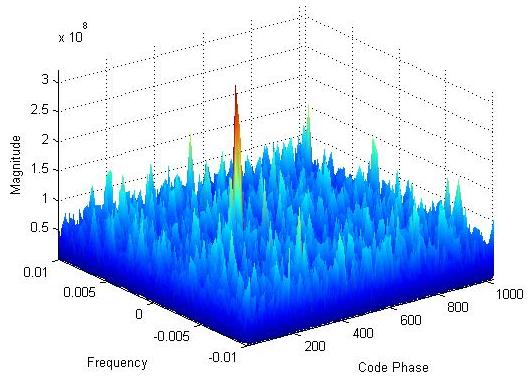
3.部分仿真图预览
4.算法概述
软件接收机主要是由两个模块组成:信号数据处理软件模块和前端信号采集硬件电路模块。软件模块细分为捕获与跟踪,星历解码与PVT估计。软件接收机系统的主线是GPS数据流的处理过程,前端以数据采集为主,在后端的设计集中于信号处理的软件编程与实现,因此,在可以采集准确的GPS数据的前提下,后端设计为软件接收机给予了很大的灵活性,为新算法的验证评估和测试提供一个有效的、便捷的服务平台。硬件模块细分则为天线,A/D转换模块,降频模块,数据采集存贮模块和串并行模块。
通常情况下,由于输入信号的C/A码的起始位置是未知的,所以在进行捕获之前,波形实现产生一个伪随机码,这里假设将接收到的模拟信号数字化为5000个点,然后与输入的信号在数字域进行相乘,将相乘得到的结果进行快速傅里叶变换,从而得到其频率。通过上一节的讨论,FFT之后的频率分量为前半部分的2500个频率分量,将输出的频率分量的幅度与设置的门限值进行比较,如果幅度值大于门限值,那么该频率分量就是所需要的期望值。通过这种算法,就能够得到之前所说的起始点位置。

































